
【标题】Learning to Walk in Minutes Using Massively Parallel Deep Reinforcement Learning
【作者团队】Nikita Rudin, David Hoeller, Philipp Reist, Marco Hutter
【发表日期】2021.9.24
【论文链接】https://arxiv.org/pdf/2109.11978v1.pdf
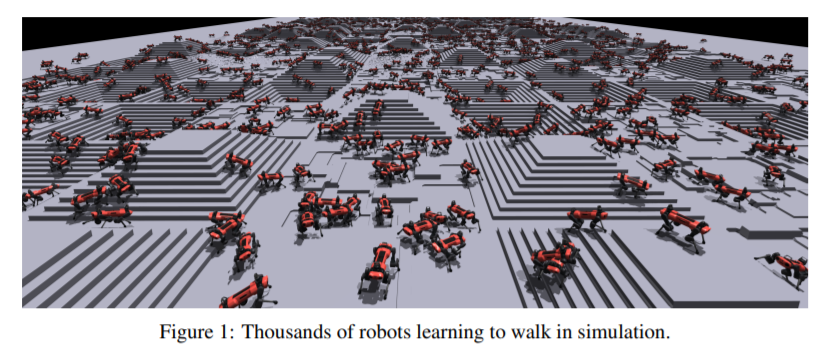
【推荐理由】本文提出并研究了一种训练设置,该设置通过在单个工作站 GPU 上使用大规模并行性来为现实世界的机器人任务实现快速策略生成。通过分析大规模并行机制中不同训练算法组件对最终策略性能和训练时间的影响。并且提出了一种新颖的游戏启发课程,非常适合与数千个模拟机器人并行训练。通过训练四足机器人 ANYmal 在具有挑战性的地形上行走来评估该方法。并行方法允许在 4 分钟内对平坦地形进行训练,而在不平坦地形上则需要 20 分钟。其代表了多个数量级的加速。最后,将本文的策略转移到真正的机器人以验证该方法,以帮助加速学习腿部运动领域的进一步研究。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢