
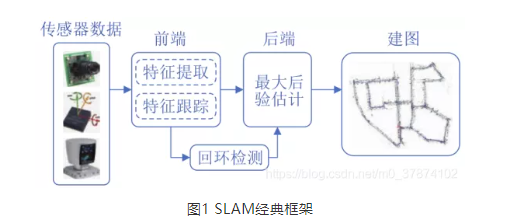
一个完整的 SLAM(simultaneous localization and mapping) 框架包括传感器数据、 前端、 后端、 回环检测与建图,如图1所示,其中,前端将传感器的数据抽象成适用于估计的模型,回环检测判断机器人是否经过已知的位置。而后端接受不同时刻前端测量的位姿和回环检测的信息并对它们进行优化,从而得到全局一致的轨迹。建图则是根据状态估计得到的轨迹建立与任务要求相对应的地图。通常,仅含有前端和局部后端的框架被称为里程计, 而带有回环检测和全局后端的完整框架被称为 SLAM。
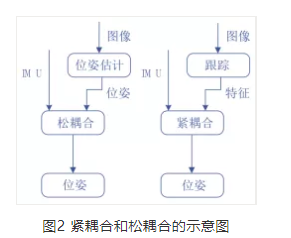
近十年来,SLAM 及其相关技术的研究取得了快速进展,研究的重点从开始的激光雷达到相机和IMU,与此同时芯片和MEMS器件的也取得快速发展,算力得到的极大提高,相机和IMU 等传感器实现了高精度化、小型化和低成本化.这使得SLAM技术在移动端能够实时的运用。而视觉传感器因其体积小、 成本低和易于进行硬件设置而获得了广泛的关注,大量基于视觉传感器的 SLAM 方法被提出,但纯视觉 SLAM 方法存在无法在图像纹理少的区域工作、快速运动时图像模糊等问题;而IMU可测量角速度和加速度,其功能可以与相机进行互补,并且在融合之后能够得到更加完善的SLAM 系统。采用相机和 IMU 的 SLAM 方法被称为视觉惯性 SLAM(visual-inertial SLAM,VI-SLAM),只含有很小的漂移。本文主要介绍VI-SLAM,对激光和纯视觉SLAM不重点介绍。目前VI-SLAM数据融合的的方法分为两类:紧耦合和松耦合,具体见图2,其中,紧耦合是指把 IMU 的状态与相机的状态合并在一起进行位姿估计。松耦合是指相机和 IMU 分别进行自身的位姿估计,然后对它们的估计结果进行融合。
而VI-SLAM根据后端优化方法的不同,分为基于滤波和基于优化 2 类方法,在滤波方法中,传统的 EKF(扩展卡尔曼滤波器) 、UKF(无迹卡尔曼滤波器)、改进的 MSCKF(多状态约束卡尔曼滤波器) 和OpenVins都取得了一定的成果。现阶段基于优化的方法则慢慢占据了主流。
戳链接即可访问全文。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢