
【标题】Learning multiple gaits of quadruped robot using hierarchical reinforcement learning
【作者团队】Yunho Kim, Bukun Son, Dongjun Lee
【发表日期】2021.12.9
【论文链接】 https://arxiv.org/pdf/2112.04741.pdf
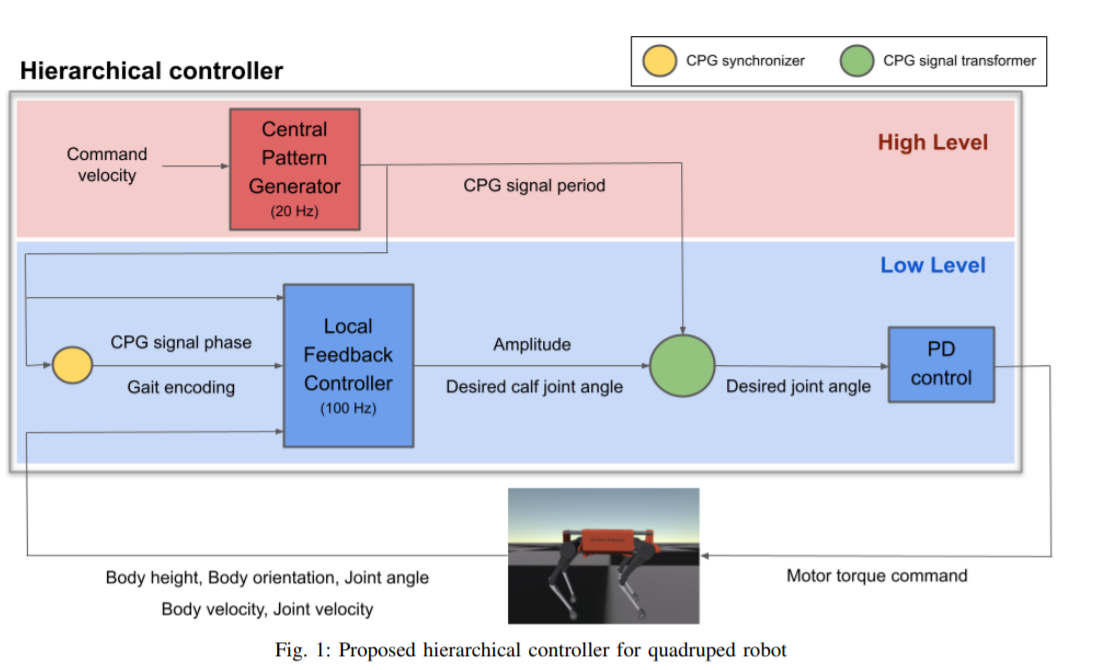
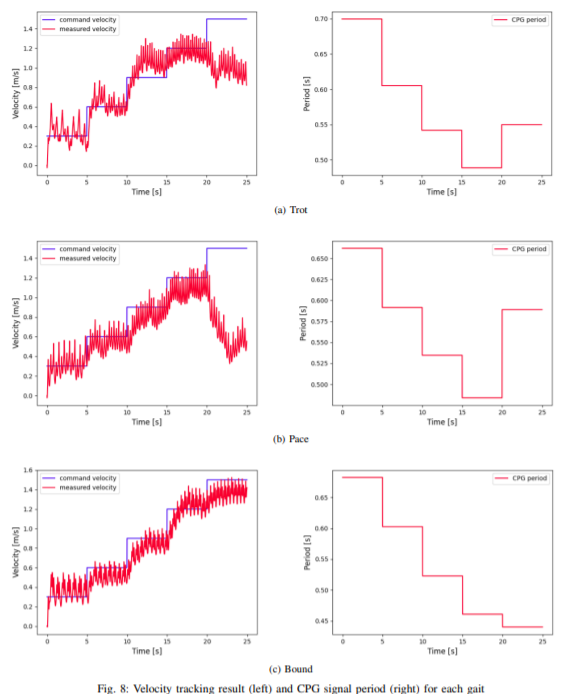
【推荐理由】由于其鲁棒性和可扩展性,人们对使用强化学习学习四足机器人的速度命令跟踪控制器越来越感兴趣。然而,无论命令速度如何,经过端到端训练的单一策略通常都会显示单一的步态。考虑到根据四足动物的速度存在最佳步态,这可能是次优解决方案。本文为四足机器人提出了一种分层控制器,它可以在跟踪速度命令的同时生成多种步态(即步伐、小跑、跳跃)。该控制器由两个策略组成,每个策略都用作中央模式生成器和本地反馈控制器,并通过分层强化学习进行训练。实验结果表明 1) 存在特定速度范围的最佳步态 ;2) 与由单个策略组成的控制器相比,本文的分层控制器的效率更高,通常显示单个步态。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢