
准确预测交通参与者的行为是自动驾驶车辆的基本能力。由于在动态变化的环境中导航,无论在何处以及遇到何种驾驶环境,都需要进行准确的预测。当自动驾驶车辆部署在现实世界中时,对未知域的泛化能力对预测模型至关重要。本文提出一种基于因果的时间序列域泛化(causal-based time series domain generalization,CTSDG)模型。构建一个车辆意图预测任务的结构化因果模型,学习用于域泛化的输入驾驶数据不变表征。进一步将递归潜变量 (latent variable) 模型集成到结构化因果模型中,更好地从时间序列输入数据中捕获时间潜在依赖性。
如下是CTSDG的伪代码算法: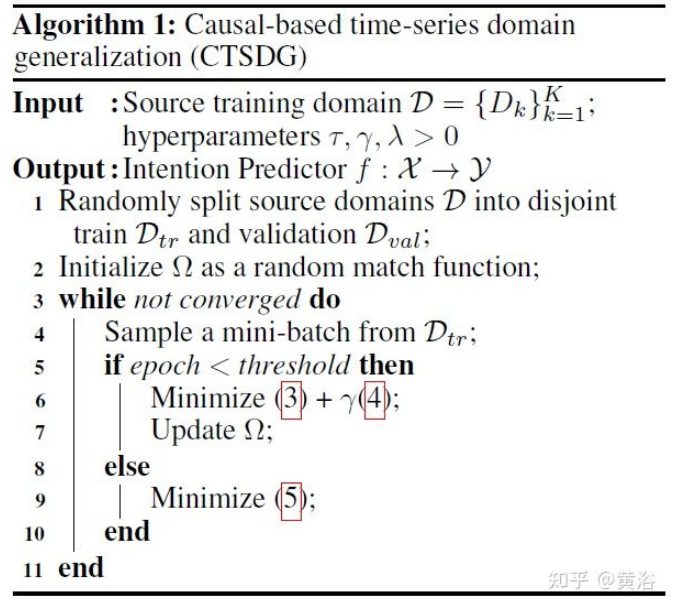
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢