
【标题】A Deep Reinforcement Learning Approach for Solving the Traveling Salesman Problem with Drone
【作者团队】Aigerim Bogyrbayeva. Taehyun Yoon, Hanbum Ko, Sungbin Lim, Hyokun Yun, Changhyun Kwon
【发表日期】2021.12.22
【论文链接】https://arxiv.org/pdf/2112.12545.pdf
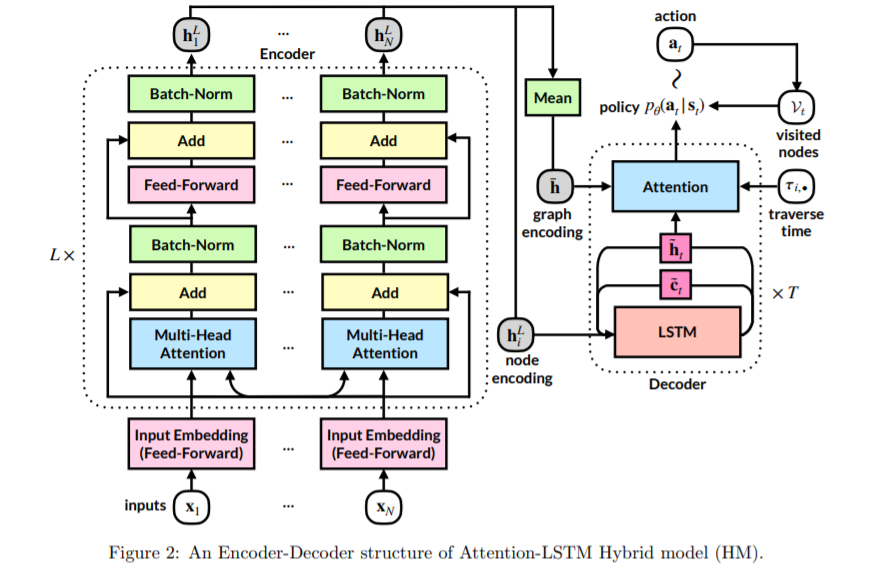
【推荐理由】强化学习最近在许多组合优化问题的学习质量解决方案中显示出前景。特别是,基于注意力的编码器-解码器模型在各种路由问题上表现出很高的效率,包括旅行商问题。然而它们在带有无人机的TSP(TSP-D)中表现不佳,需要协调路由一个异构车队——一辆卡车和一架无人机。在TSP-D中,两辆车一前一后移动,可能需要在一个节点等待另一辆车加入。基于无状态注意力的解码器无法在车辆之间进行这种协调。故本文提出了一个注意力编码器-LSTM解码器混合模型,其中解码器的隐藏状态可以表示所做的动作序列。从经验上证明,这种混合模型在解决方案质量和计算效率方面都优于纯粹基于注意力的模型。并在min-max Capacitated Vehicle Routing Problem (mmCVRP)最小-最大容量约束车辆路径问题上的实验也证实了混合模型比基于注意力的模型更适合多车辆的协调路径。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢