
【标题】Adversarial Deep Reinforcement Learning for Trustworthy Autonomous Driving Policies
【作者团队】Aizaz Sharif, Dusica Marijan
【发表日期】2021.12.22
【论文链接】https://arxiv.org/pdf/2112.11937.pdf
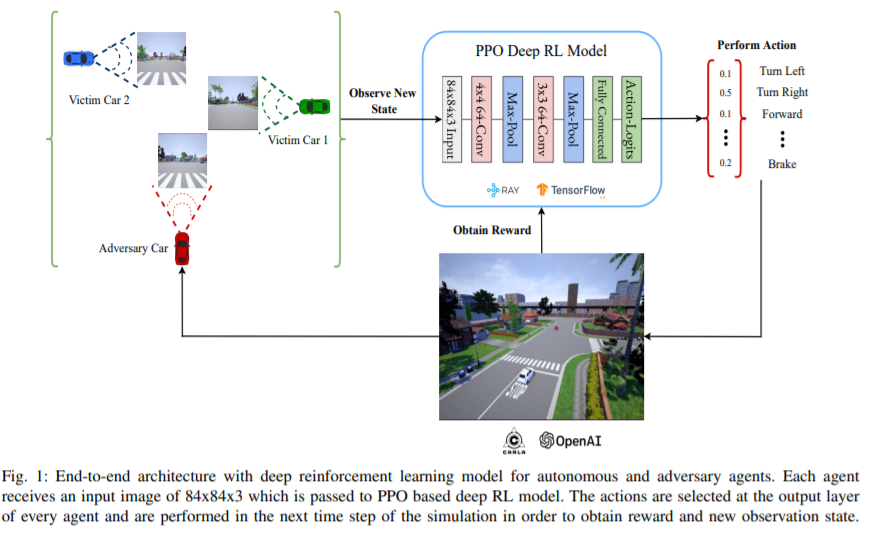
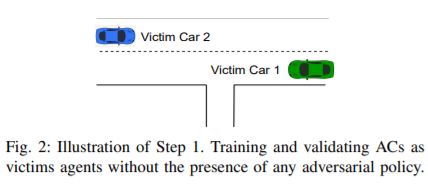
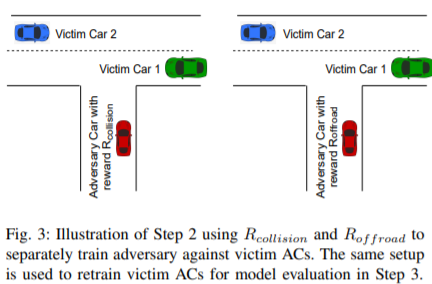
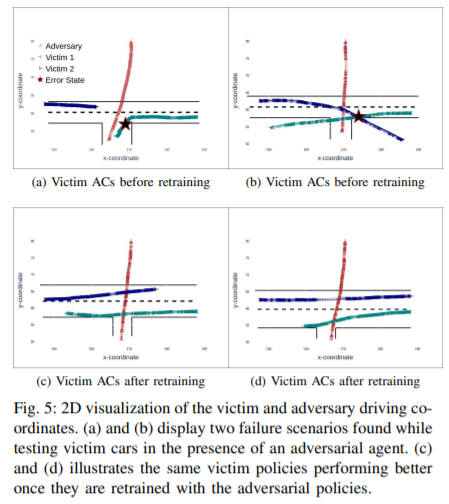
【推荐理由】深度强化学习被广泛用于在模拟环境中训练自动驾驶汽车。尽管如此,无人驾驶汽车在遭遇敌对攻击时还是很容易受到攻击。由此引发的问题为是否可以训练对手作为驱动智能体,在自动驾驶汽车中发现故障场景,然后用新的对抗性输入重新训练自动驾驶汽车,以提高它们的鲁棒性。本文首先在两个自定义奖励函数上训练和比较对抗性汽车策略,以测试多智能体环境下自动驾驶汽车的驾驶控制决策。其次,通过验证对抗性示例不仅可以用于发现不想要的自动驾驶行为,还可以帮助自动驾驶汽车改进其深度强化学习策略。通过使用高保真城市驾驶模拟环境和基于视觉的驾驶代理,本文证明了使用对手播放器重新训练的自动驾驶汽车在减少碰撞和越野转向错误方面显著提高了其驾驶策略的性能。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢