
论文标题:
MULTI-SCALE FEATURE FUSION: LEARNING BETTER SEMANTIC SEGMENTATION
FOR ROAD POTHOLE DETECTION
论文链接:
https://arxiv.org/pdf/2112.13082.pdf
本文提出了一种基于单模态语义分割的新型坑洼检测方法。它首先使用卷积神经网络从输入图像中提取视觉特征,然后通道注意力模块重新加权通道特征以增强不同特征图的一致性。随后,研究者采用了一个空洞空间金字塔池化模块(由串联的空洞卷积组成,具有渐进的扩张率)来整合空间上下文信息。
这有助于更好地区分坑洼和未损坏的道路区域。最后,使用研究者提出的多尺度特征融合模块融合相邻层中的特征图,这进一步减少了不同特征通道层之间的语义差距。在Pothole-600数据集上进行了大量实验,以证明提出的方法的有效性。定量比较表明,新提出的方法在RGB图像和转换后的视差图像上均达到了最先进的 (SoTA) 性能,优于三个SoTA单模态语义分割网络。
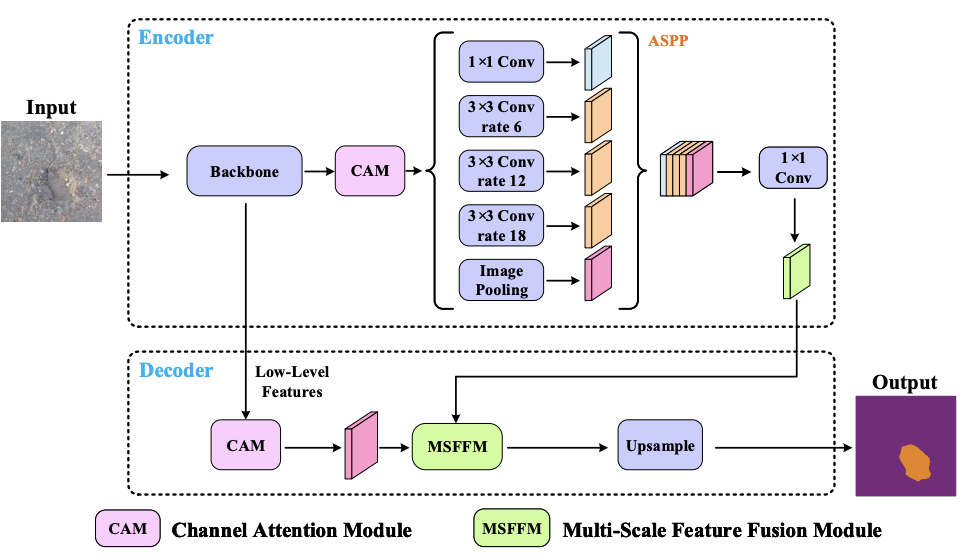
研究者提出的道路坑洼检测网络的架构如上图所示。首先,采用预训练的dilated ResNet-101作为主干来提取视觉特征,还在最后两个ResNet-101块中用空洞卷积替换下采样操作,因此最终特征图的大小是输入图像的1/8。
该模块有助于在不引入额外参数的情况下保留更多细节。此外,采用Deeplabv3中使用的ASPP模块来收集顶层特征图中的上下文信息。然后,采用CAM重新加权不同通道中的特征图。它可以突出一些特征,从而产生更好的语义预测。最后,将不同级别的特征图输入到MSFFM中,以提高坑洼轮廓附近的分割性能。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢