
【标题】Hybrid Reinforcement Learning-Based Eco-Driving Strategy for Connected and Automated Vehicles at Signalized Intersections
【作者团队】Zhengwei Bai, Peng Hao, Wei Shangguan, Baigen Cai, Matthew Barth
【发表日期】2022.1.19
【论文链接】https://arxiv.org/pdf/2201.07833.pdf
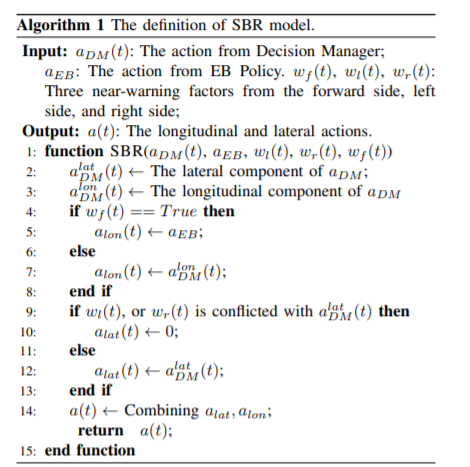
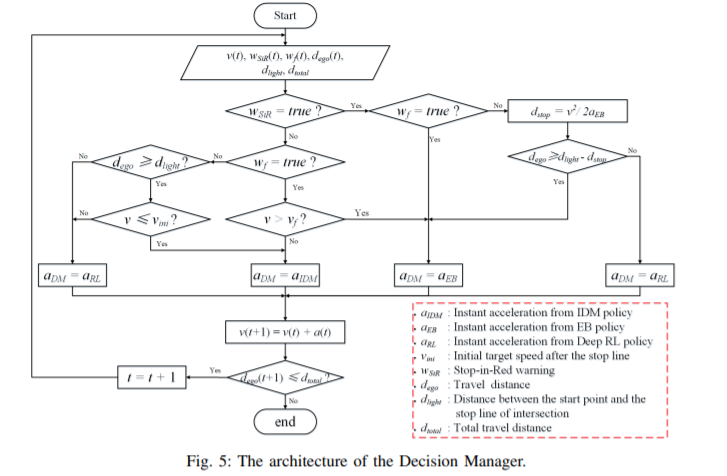
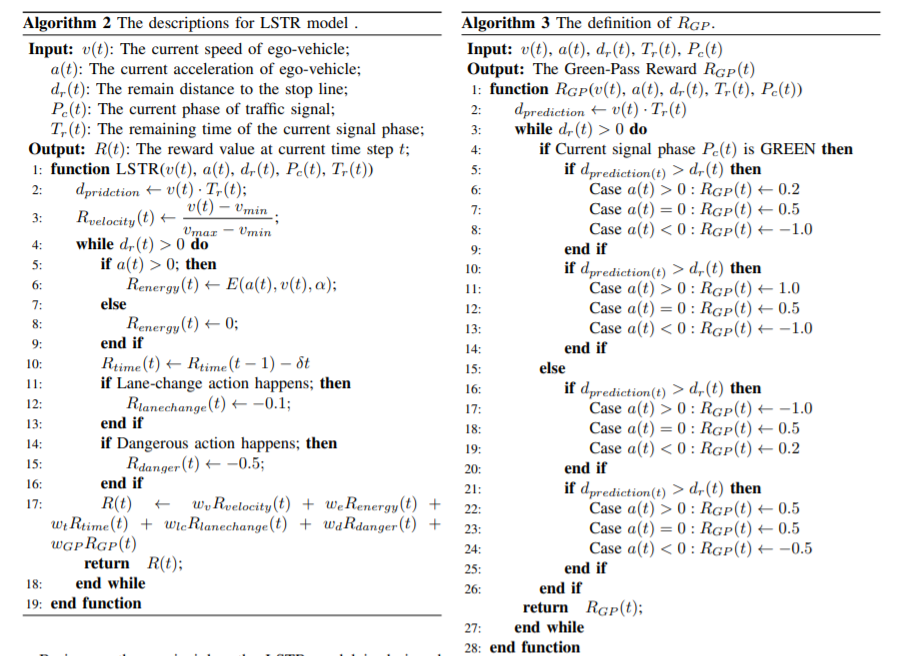
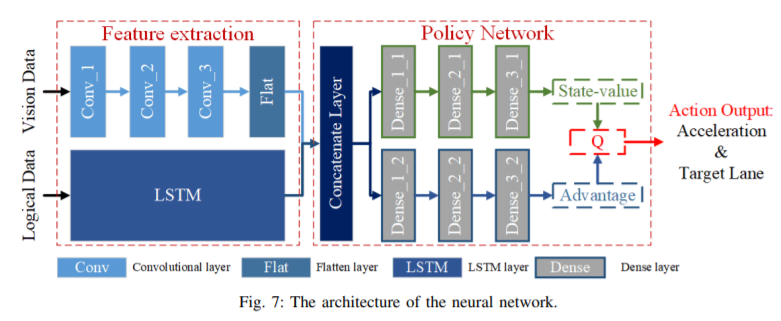
【推荐理由】利用车联网 (V2X) 通信和自动驾驶技术,互联和自动驾驶汽车正迅速成为解决许多交通问题的变革性解决方案之一。本文提出了混合强化学习 (HRL) 框架,该框架结合了基于规则的策略和深度强化学习 (deep RL),以支持混合交通中信号交叉口的互联生态驾驶。视觉感知方法与车辆到基础设施 (V2I) 通信相集成,以在混合连接的交通中实现更高的移动性和能源效率。HRL 框架包含三个组件:基于规则的驱动管理器,用于操作基于规则的策略和 RL 策略之间的协作;提取视觉和V2I信息的隐藏特征的多流神经网络;以及基于 RL 的深度政策网络,可生成纵向和横向的生态驾驶行为。为了评估该方法,本文开发了一个基于 Unity 的模拟器并设计了一个混合交通路口场景。此外,通过几个基线以与该设计进行比较,并进行了数值实验以测试 HRL 模型的性能。实验表明,与最先进的基于模型的生态驾驶方法相比, HRL 方法可以减少 12.70% 的能源消耗并节省 11.75% 的行程时间。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢