
【标题】Multi-task Safe Reinforcement Learning for Navigating Intersections in Dense Traffic
【作者团队】Yuqi Liu, Qichao Zhang, Dongbin Zhao
【发表日期】2022.2.19
【论文链接】https://arxiv.org/pdf/2202.09644.pdf
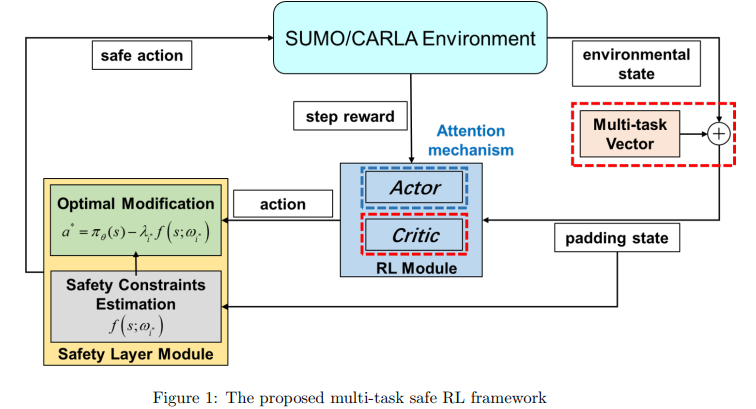
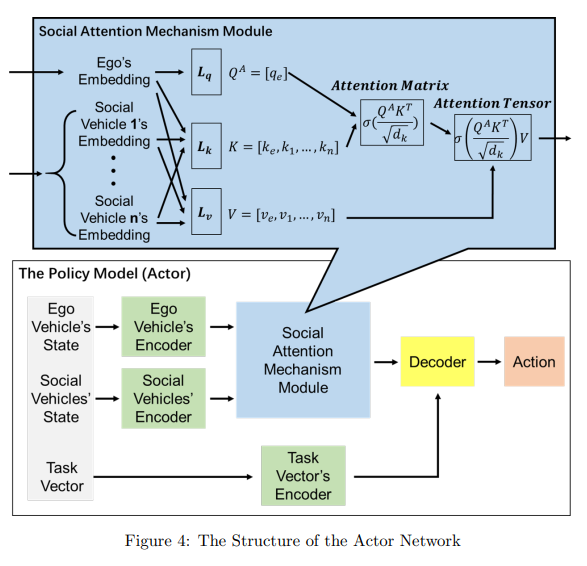
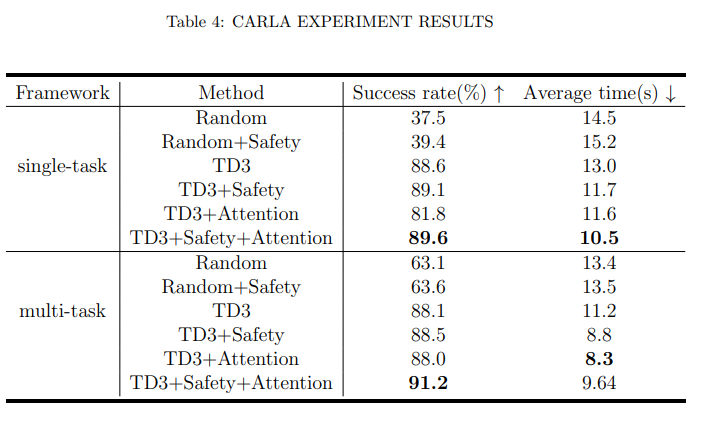
【推荐理由】对于自动驾驶来说,多任务交叉口导航(包括无保护左转、右转和在密集交通中直行)仍然是一项具有挑战性的任务。对于人类驾驶员来说,与其他交互式车辆的协商技巧是保证安全和效率的关键。然而,在多任务交叉口导航中,很难平衡自动驾驶车辆的安全性和效率。本文中提出了一种多任务的安全强化学习方法,以提高与其他交通参与者互动时的安全性和效率。具体而言,社交注意力模块用于关注谈判工具的状态。此外,在多任务强化学习框架中增加了一个安全层,以保证安全协商。本文在模拟多任务交叉口导航的SUMO和CARLA中进行了大量交通流和高保真车辆模型的对比实验,这两个实验都表明,对于多任务交叉口导航,该算法可以在保持交通效率一致的情况下提高安全性。

内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢