
【标题】CADRE: A Cascade Deep Reinforcement Learning Framework for Vision-based Autonomous Urban Driving
【作者团队】Yinuo Zhao, Kun Wu, Zhiyuan Xu, Zhengping Che, Qi Lu, Jian Tang, Chi Harold Liu
【发表日期】2022.2.17
【论文链接】https://arxiv.org/pdf/2202.08557.pdf
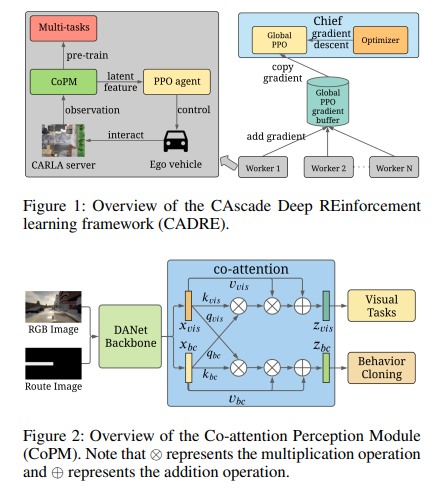
【推荐理由】由于复杂的城市环境和驾驶行为的动态性,基于视觉的城市密集交通中的自主驾驶具有很大的挑战性。广泛应用的方法要么严重依赖手工制定的规则,要么从有限的人类经验中学习,这使得它们很难推广到罕见但关键的场景。本文提出了一种新颖的 CAscade 深度强化学习框架 CADRE,以实现基于视觉的无模型自动城市驾驶。在 CADRE 中,为了从原始观察中获得具有代表性的潜在特征,本文首先离线训练一个协同注意感知模块(CoPM),该模块利用协同注意力机制从预先收集的驾驶数据集中学习视觉和控制信息之间的相互关系。然后,提出了一个有效的分布式近端策略优化框架,在特定设计的奖励函数的指导下在线学习驱动策略。本文使用CARLA NoCrash基准以及自动城市驾驶任务中的特定避障场景进行了全面的实证研究。实验结果很好地证明了 CADRE 的有效性及其在很大程度上优于最先进的技术。

内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢