
【标题】Graph-based Reinforcement Learning meets Mixed Integer Programs: An application to 3D robot assembly discovery
【作者团队】Niklas Funk, Svenja Menzenbach, Georgia Chalvatzaki, Jan Peters
【发表日期】2022.3.8
【论文链接】https://arxiv.org/pdf/2203.04120.pdf
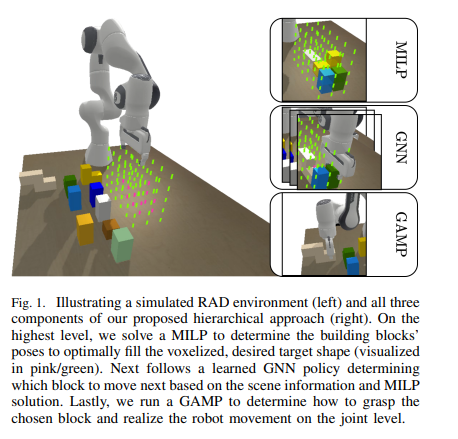
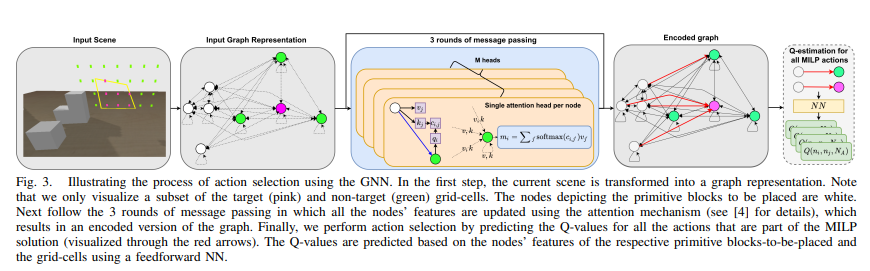
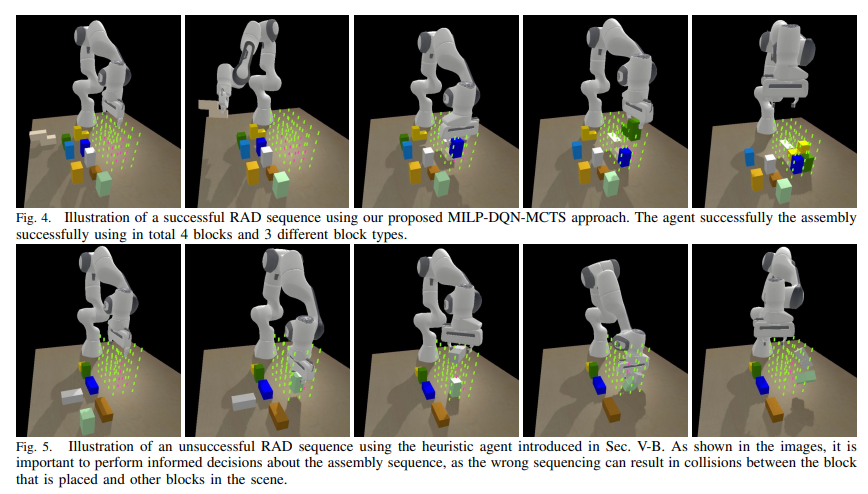
【推荐理由】机器人装配发现是具有挑战性的问题,它存在于资源分配和运动规划的交叉点。目标是在考虑机器人在循环中执行任务的同时,将一组预定义的对象组合成新的对象。本文使用一组类似俄罗斯方块的积木和一个机械手,解决了完全从头开始构建任意预定义目标结构的问题。本文新颖的分层方法旨在有效地将整个任务分解为三个相互受益的可行级别。高层运行一个经典的混合整数规划,用于对块类型选择和块的最终姿势进行全局优化,以重建所需的形状。然后利用其输出有效地指导潜在强化学习(RL)策略的探索。此外,它还考虑了结构稳定性和机器人可行性的必要条件,而这些条件无法有效地反映在前一层中。最后,抓取和运动规划器将所需的装配命令转换为机器人关节运动。通过在一组竞争性的模拟机器人装配发现环境中演示了该方法的性能,并报告了与非结构化端到端方法相比的性能和鲁棒性增益。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢