
介绍李飞飞团队最近发布的一项研究,提出了用于机器人系统训练的MetaMorph方法。
论文标题:MetaMorph: Learning Universal Controllers with Transformers
论文地址:https://arxiv.org/abs/2203.11931
代码地址:https://github.com/agrimgupta92/metamorph
论文摘要:
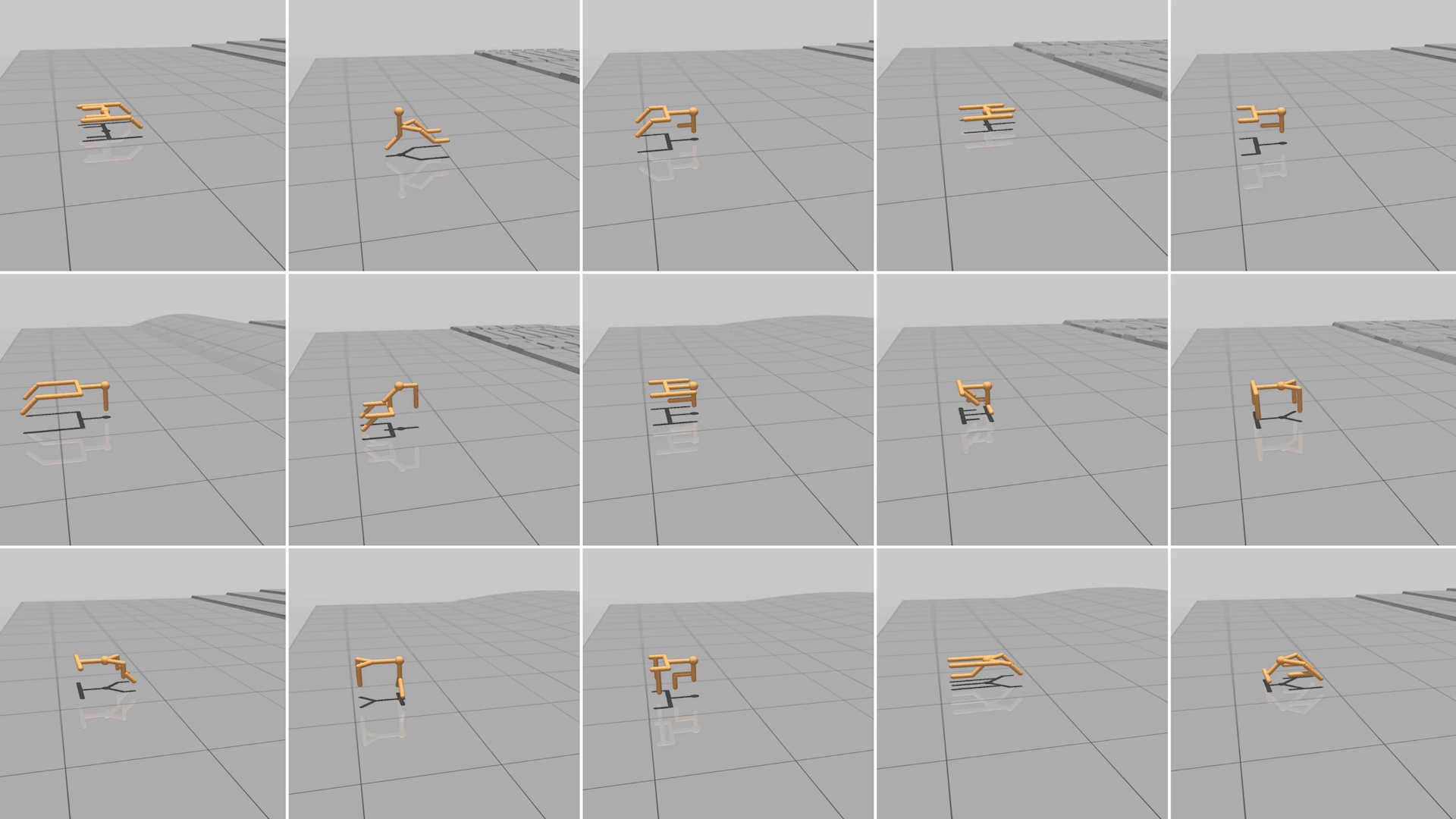
视觉、自然语言和音频等多个领域正在见证巨大的进步,通过利用 Transformer 进行大规模预训练,然后进行特定于任务的微调。相比之下,在机器人技术中,我们主要训练单个机器人完成单个任务,然而模块化机器人系统现在允许将通用构建块灵活地组合成任务优化的形态,而鉴于可能的机器人形态呈指数级增长,为每个新设计培训一个控制器是不切实际的。所以在这项工作中,我们提出了MetaMorph,这是一种基于Transformer的方法,用于在模块化机器人设计空间中学习通用控制器。MetaMorph基于这样一种见解,即机器人形态学只是我们可以调节Transformer输出的另一种模式。通过广泛的实验,我们证明,对各种机器人形态的大规模预训练会导致具有组合泛化能力的策略,包括对看不见的机器人形态的零次泛化。我们进一步证明,我们预训练的策略可用于将样品有效地转移到全新的机器人形态和任务中。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢