
论文标题:Multi-Robot Active Mapping via Neural Bipartite Graph Matching
论文链接:https://fqnchina.github.io/QingnanFan_files/cvpr_2022_mapping.pdf
该论文由北京大学陈宝权研究团队与山东大学、腾讯AI Lab、清华大学、斯坦福大学合作,将传统方法与机器学习相结合,提出了多机器人协同主动建图算法 NeuralCoMapping,实现了室内场景完整地图的高效构建。实验证明,相比于其他多机协同建图算法,NeuralCoMapping 在时间效率上具有显著优势,而且在多种未知场景和不同数量机器人上表现出卓越的泛化能力。
NeuralCoMapping 算法由四个模块组成:建图模块(Mapping Module),全局规划器(Global Planner),局部规划器(Local Planner)和动作控制器(Action Controller)。
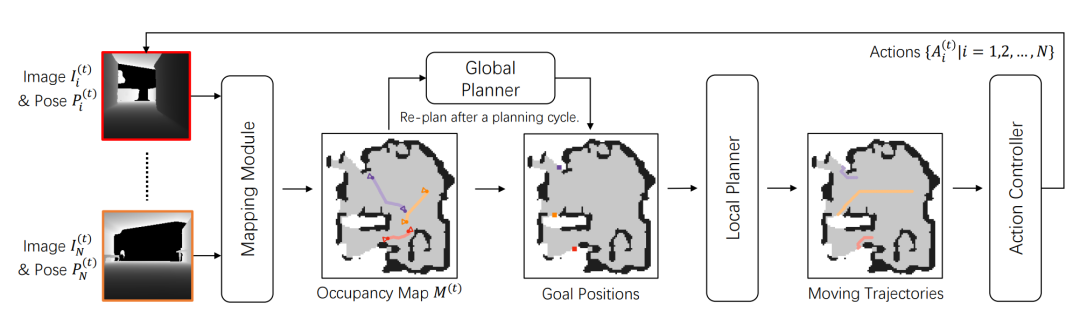
图1 算法流程图
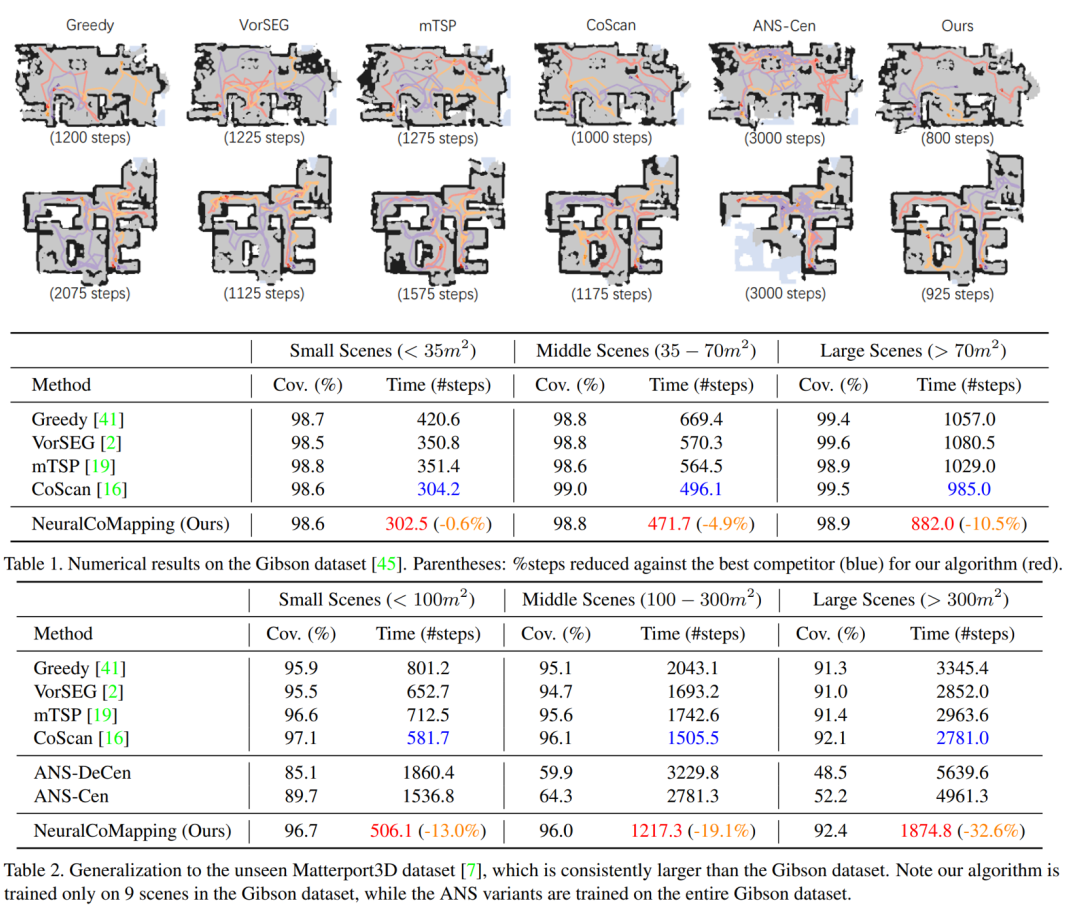
图3. 时间效率实验结果
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢