
【标题】A Study of Reinforcement Learning Algorithms for Aggregates of Minimalistic Robots
【作者团队】Joshua Bloom, Apratim Mukherjee, Carlo Pinciroli
【发表日期】2022.3.28
【论文链接】https://arxiv.org/pdf/2203.15129.pdf
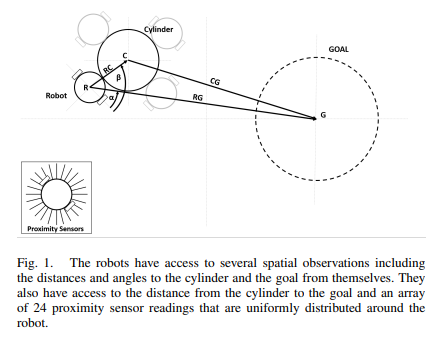
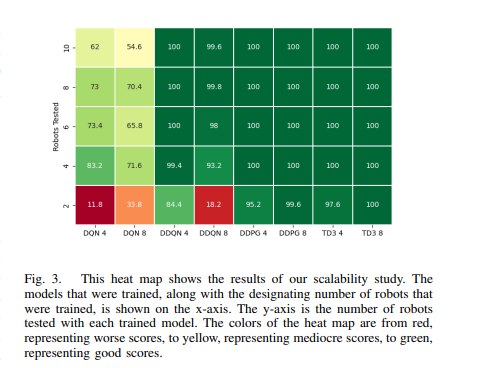
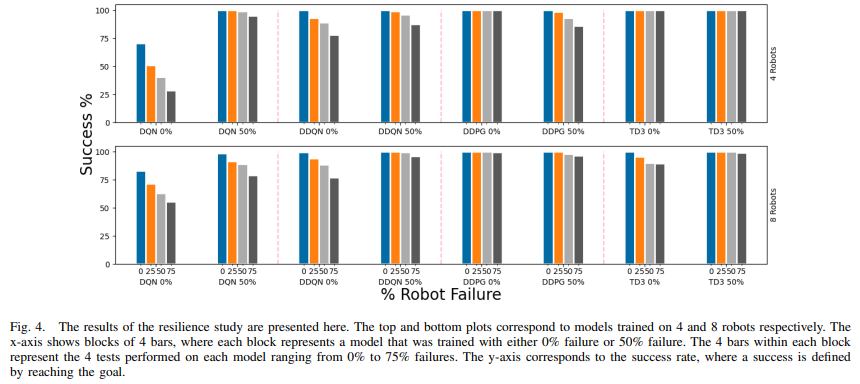
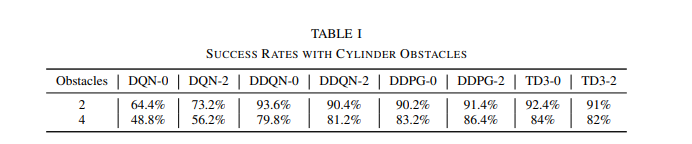
【推荐理由】本文旨在研究如何将深度强化学习应用于极简机器人群体的控制。其将聚合定义为具有物理连接的机器人组,这些物理连接迫使它们形成特定的形状。在本案例中,机器人预先连接到一个物体上,这个物体必须被集体运输到一个已知的位置。在该环境中,极简主义源于本文假设的准系统能力:机器人可以感知目标位置和眼前的障碍物,但缺乏通过信息传递等方式进行明确沟通的手段。在本环境中,通信是隐式的,即通过每个机器人对物体施加的聚合推拉来实现。通过分析四种著名的深度强化学习算法(DQN、DDQN、DDPG和TD3)达到协调行为的能力。该实验包括机器人故障和不同类型的环境障碍。本文比较了发现的最佳控制策略的性能,强调了每种考虑的训练算法的优缺点。

内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢