
【标题】Hybrid LMC: Hybrid Learning and Model-based Control for Wheeled Humanoid Robot via Ensemble Deep Reinforcement Learning
【作者团队】Donghoon Baek, Amartya Purushottam, Joao Ramos
【发表日期】2022.4.7
【论文链接】https://arxiv.org/pdf/2204.03159.pdf
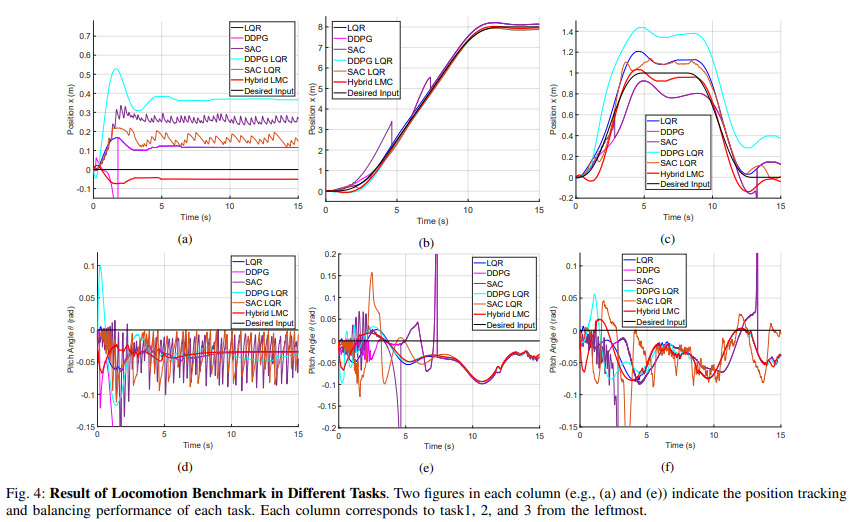
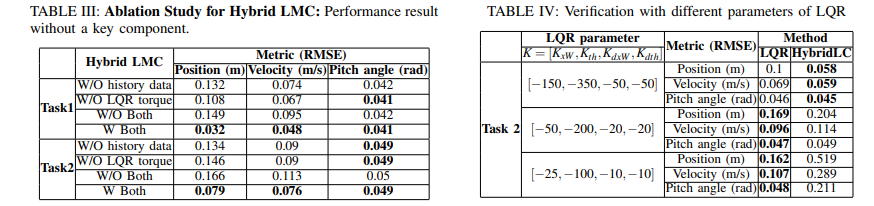
【推荐理由】由于机器人的非线性动力学和欠驱动特性,轮式仿人机器人的运动控制是一个具有挑战性的问题。这些方法通常受到所用基础模型的保真度、控制器的选择和所考虑的环境变量(地表类型、地面倾角等)的限制。强化学习(RL)的最新进展为解决传统反馈控制器问题提供了有希望的方法,但需要大量交互数据才能学习。本文提出了一种混合学习和基于模型的控制器混合LMC,它结合了经典线性二次调节器(LQR)和集成深度强化学习的优点。集成深度强化学习是由多个软参与者批评(SAC)组成,用于减少RL网络的方差。通过串联使用反馈控制器,网络在训练的早期阶段表现出稳定的性能。作为初步步骤,其探索了混合LMC在MuJoCo模拟器中通过一组不同的物理参数控制仿人机器人的轮式运动的可行性。研究结果表明,与其他现有技术相比,混合LMC实现了更好的性能,并提高了采样效率。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢