
【标题】Automating Reinforcement Learning with Example-based Resets
【作者团队】Jigang Kim, J. hyeon Park, Daesol Cho, H. Jin Kim
【发表日期】2022.4.6
【论文链接】https://arxiv.org/pdf/2204.02041v2.pdf
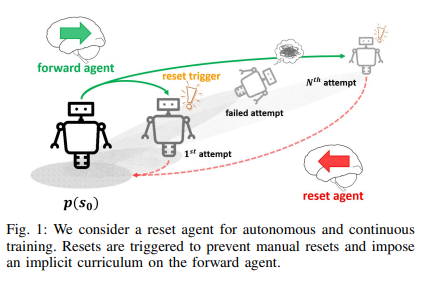
【推荐理由】深度强化学习使机器人能够从环境交互中学习运动技能,而无需任何先验知识。然而,现有的强化学习算法假设一个情节设置,其中智能体在每个情节结束时重置为固定的初始状态分布,以成功训练代理从重复试验中。重置机制虽然对于模拟任务来说微不足道,但对于提供现实世界的机器人任务来说可能具有挑战性。机器人系统中的重置通常需要广泛的人工监督和特定任务的变通办法,这与自主机器人学习的目标相矛盾。本文通过引入额外的智能体来学习以自监督的方式进行重置,从而将传统的强化学习扩展到更大的自主性。重置智能体抢先触发重置以防止手动重置,并隐含地为前向代理强加课程。应用该方法从零开始学习一套模拟和现实世界的连续控制任务,并证明重置代理成功地学会了减少手动重置,同时还允许前向策略随着时间的推移逐渐改进。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢