
【标题】Distributed Reinforcement Learning for Robot Teams: A Review
【作者团队】Yutong Wang, Mehul Damani, Pamela Wang, Yuhong Cao, Guillaume Sartoretti
【发表日期】2022.4.7
【论文链接】https://arxiv.org/pdf/2204.03516.pdf
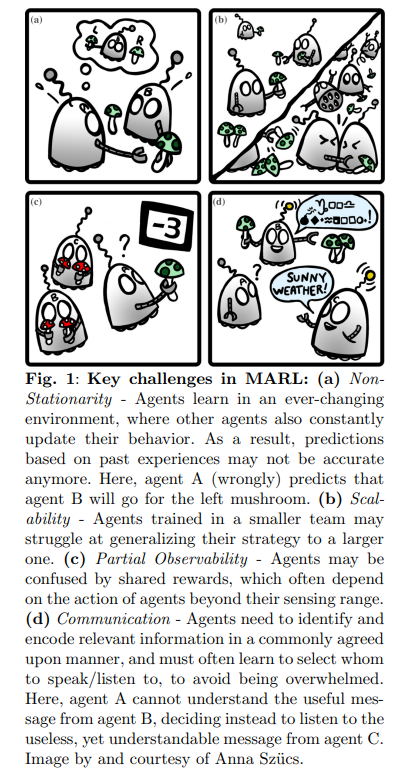
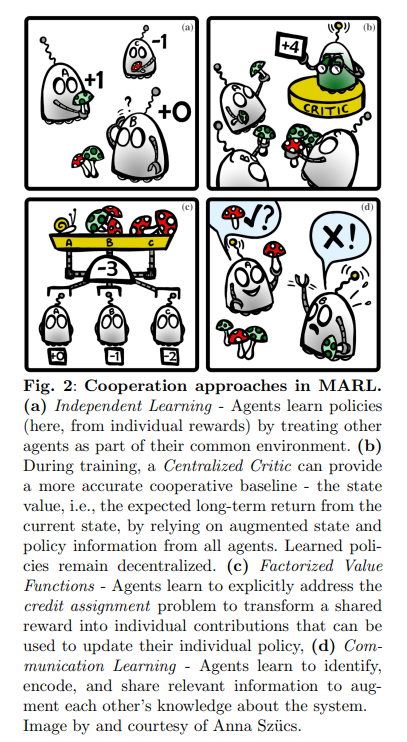
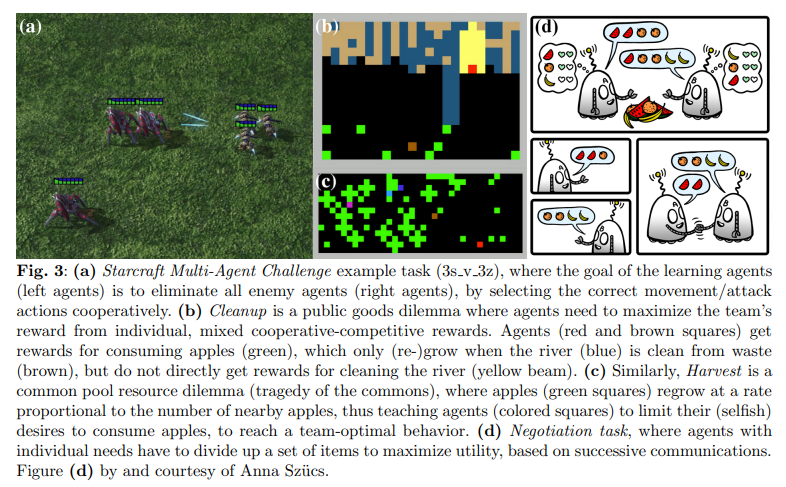
【推荐理由】综述目的:传感、驱动和计算方面的最新进展为由成百上千个机器人组成的多机器人系统打开了大门,在自动化制造、救灾、收获、最后一英里运送、港口/机场运营或搜索和救援方面有着广阔的应用前景。该社区利用无模型多智能体强化学习(MARL)为多机器人系统(MRS)设计高效、可扩展的控制器。本文旨在分析分布式MARL在多机器人协作中的应用现状。最新发现:去中心化MRS面临着根本性的挑战,例如非平稳性和部分可观测性。在“集中培训、分散执行”范式的基础上,最近的MARL方法包括独立学习、集中批评、价值分解和交流学习方法。通过人工智能基准测试和基本的现实机器人能力(如多机器人运动/路径规划)展示合作行为。总结:该综述报告了多机器人合作的分散式无模型MARL和现有方法的挑战。介绍了基准测试和机器人应用,并讨论了当前开放的研究途径。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢