
论文标题:Deep Depth Completion A Survey
论文链接:https://arxiv.org/abs/2205.05335
作者单位:香港中文大学 & 三星研究院
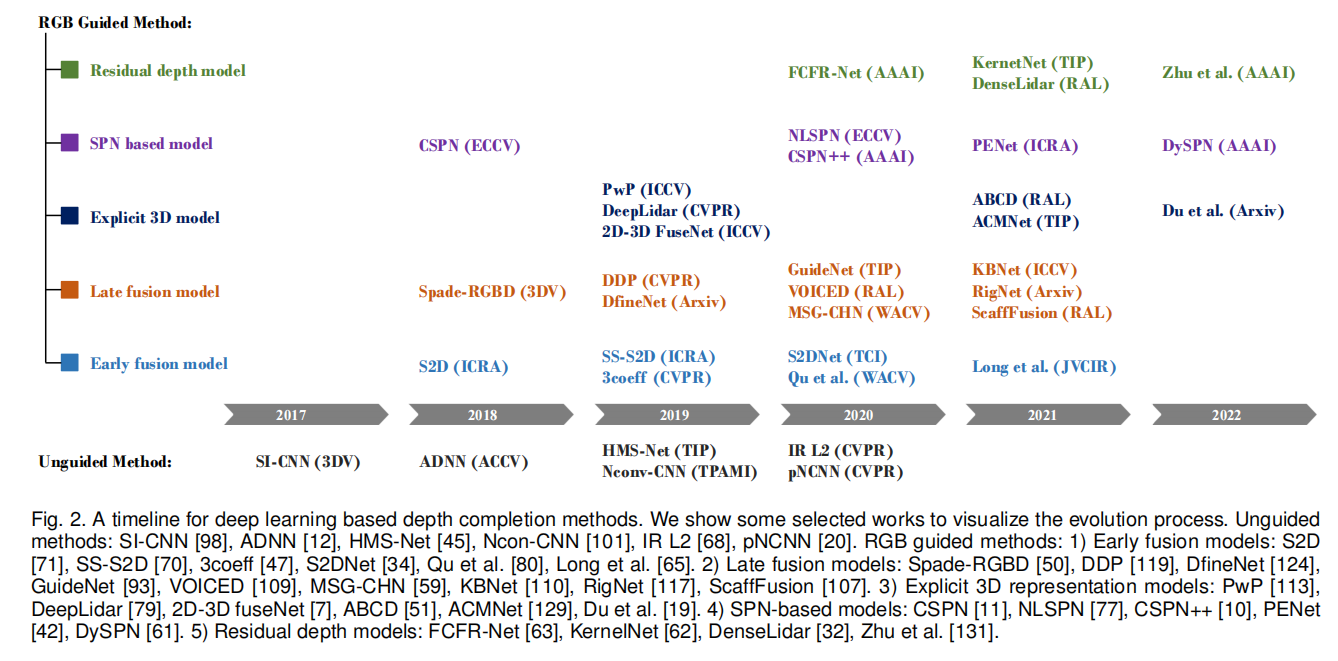
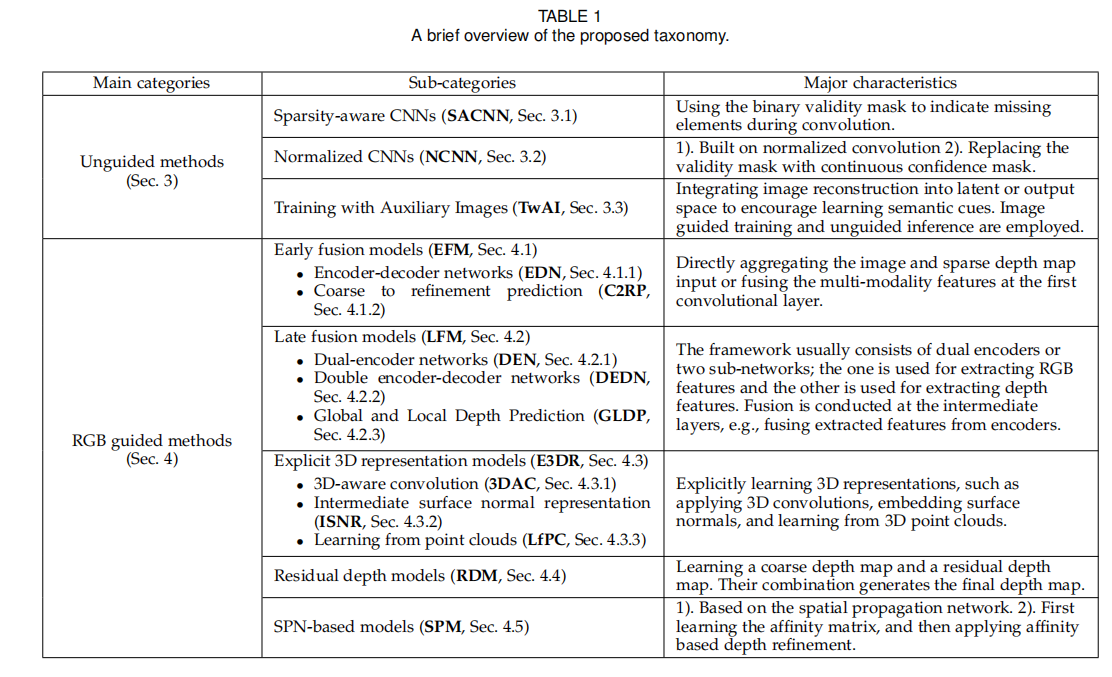
深度补全旨在从深度传感器捕获的稀疏地图中预测密集的像素级深度。它在自动驾驶、3D 重建、增强现实和机器人导航等各种应用中发挥着至关重要的作用。基于深度学习的解决方案已经证明并主导了该任务的最新成功。在本文中,我们首次提供全面的文献综述,帮助读者更好地掌握研究趋势,清楚地了解当前的进展。我们从网络架构、损失函数、基准数据集和学习策略的设计方面调查相关研究,并提出了一种对现有方法进行分类的新分类法。此外,我们在两个广泛使用的基准数据集(包括室内和室外数据集)上对模型性能进行了定量比较。最后,我们讨论了先前工作的挑战,并为读者提供了对未来研究方向的一些见解。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢