
【标题】Beyond Greedy Search: Tracking by Multi-Agent Reinforcement Learning-based Beam Search
【作者团队】Xiao Wang, Zhe Chen, Jin Tang, Bin Luo, Dacheng Tao
【发表日期】2022.5.19
【论文链接】https://arxiv.org/pdf/2205.09676.pdf
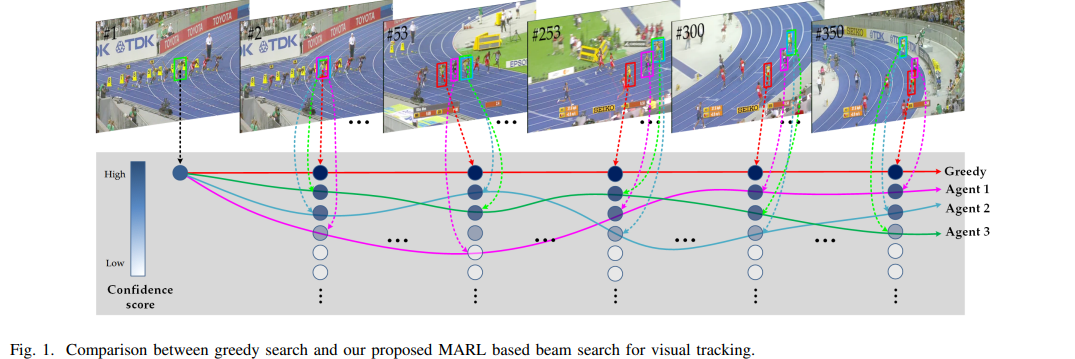
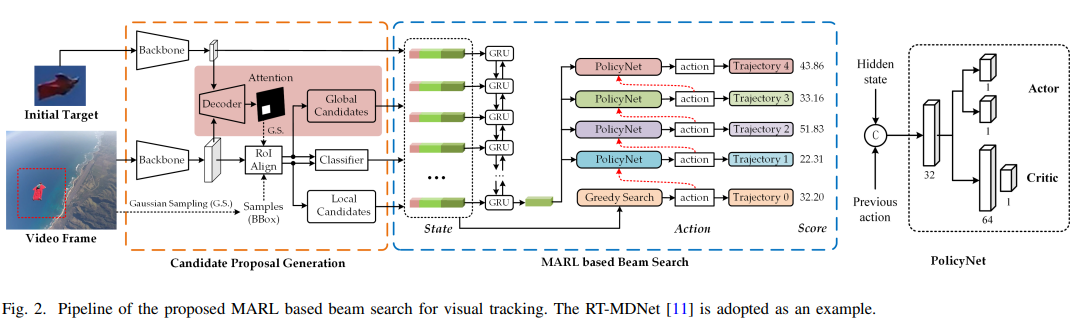
【推荐理由】现有跟踪器通常会选择一个位置或方案,并将其作为每帧的跟踪结果。然而,这种贪婪的搜索方案可能不是最佳选择,尤其是在遇到诸如严重遮挡和快速运动等具有挑战性的跟踪场景时。由于累积的错误会使响应分数不再可靠。本文提出了基于多智能体强化学习的波束搜索策略(称为BeamTracking)来解决这个问题。将跟踪描述为由多个并行决策过程完成的样本选择问题,每个并行决策过程的目的是在每一帧中挑选一个样本作为其跟踪结果。将目标特征、提议特征及其响应分数作为状态,并考虑附近智能体预测的动作,训练多智能体来选择自己的动作。当所有帧进行处理后,会选择累积得分最大的轨迹作为跟踪结果。在七个流行的跟踪基准数据集上进行的大量实验验证了该算法的有效性。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢