

反省类比
CreateTime 2020.08.12
简介:
分享一下最近我们HE系统在训练中遇到的问题,以及因此而不得不迭代反省类比算法,更深入研究反省,使系统决策能够支持更加理性的评价。详情如下:
情境:
起因是这样的,前段时间我一直在虚拟场景下训练一只乌鸦(可自行参考朱松纯教授提出的乌鸦挑战),例中有乌鸦吃坚果的训练,我们知道坚果的位置是不会影响到乌鸦吃坚果的,而乌鸦经历很多次吃坚果,当坚果在汽车流动的路面上是不能吃的。
如果我们想让乌鸦明确的知道坚果不能吃,是与汽车流动相关,而与坚果的位置无关,我们就不得不使乌鸦从这样的经历中快速习得相关常识,并应用到今后的决策中,这在决策中是一个非常理性的评价要求。
本文涉及到的算法介绍:
在HE中有一个算法,是负责在智能体输出行为后,再反馈回来时,是否达到了预期效果,然后对效果进行修正(以下称此算法为PM算法)。比如乌鸦想吃坚果,但发现坚果很远,它从这个算法中能够发现,自己想得到的是一个距离为0的能直接吃的坚果,而现实世界输入的是远处的坚果,那么乌鸦需要去解决这个距离问题。
可是坚果不止有距离特征,还有别的特征,比如坚果的位置,坚果的色泽,哪些影响到乌鸦吃坚果的任务了,哪些没有影响呢?我们需要一个理性的评价方式,去分析出哪些特征影响任务的执行,比如:苹果有毒不能吃,苹果脏了洗洗可以吃,苹果有点酸不影响吃。
PM算法以往的做法,有两种: 1. 第一种是基于以往经历的,比如我因为坚果有皮而吃失败过,所以就知晓有皮的不能吃。或者距离远的坚果,我经历过吃不到。 2. 第二种是基于经历的分析的,比如我距离近的坚果能吃掉,而远的吃不到。二者一对比,则知道因为距离导致我吃不到。
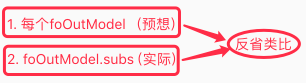
这二者听起来都很简单吧?但我们发现,第二种其实是一种反省类比算法,即“预想”与“实际”之间,进行对比(见下图),并发现其中的不同,将其构建成知识经验(本文将反省经验简称为SP),以供今后使用,比如反省类比得到“P:距离0可吃”与“S:距离>0不可吃”。
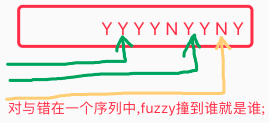
而第一种其实是存在问题的,因为有些特征,我们不可能经历一模一样的两次,比如距离,有时是138,有时是265,如果我们想进行匹配必须进行模糊匹配,但值得注意的是,我们的经历不是百分百的熵减信息,即在任何位置的坚果都可以吃吗?比如车流中就不能吃,但没有车时又可以吃。当这个位置序列中,共有90%的知识为正确,10%为错误时,无论我们如何模糊匹配,都有可能得到错误的评价结果,导致明明可以,却认为不行,明明不行,却认为可以。见下图:
综上,我们发现第一种首先是要pass掉的,这种具有一定比例错误性的信息(我一般称其为模糊信息),导致的错误是致命的。而第二种中,反省类比算法带来的SP知识可以帮助我们快速的针对问题的关键点进行理性评价。但以往HE系统中的反省算法其实并不成熟,因为其仅对预测价值与实际发生价值为反向的进行了类比(所以以前反省算法的名字叫“反向反馈类比”算法)。
重点关注上面提到的“预测价值”与“反向价值”,当价值的影响很直接时,比如乌鸦饿了,饱了,其实本身与此相关的信息就是感性的,但我们需要的SP不是用来做理性评价的吗?如果这么直接的使用“价值影响”为基准信息得出结果,必然会导致其不够理性的问题,(这一点在训练实测中,已经证实),所以本文我将重点介绍如何更加充分,更加理性的对反省类比算法进行迭代。
在上面的例子中,一个概念具备N个特征,其实一部分影响到任务推进(如坚果有皮吃不到、或者坚果很远吃不到),也有一部分特征不影响任务推进(如在窝里吃坚果、或者在树下吃坚果),也有一部分有时影响有时不影响(比如在路上吃坚果,有车流不能吃,无车流则可吃)。那么以下部分,我们重点分析如何使用反省的方式来解决这一问题。
在HE系统的决策中,任务的解决是以决策递归的方式来运作的(结构化循环),比如饭了先想到吃食物,再想到食物有坚果或者面条,找到坚果时,再分析坚果需要去皮,或者解决距离问题。在每一轮决策循环中,都会有一个时序(即任务计划)的推进,比如我想吃坚果,时序为[0距果,吃]->{价值饱},即先得到0距坚果,再吃即可。但我们得到的实际输入,比如(距23果),往往不符合预期(0距果),那么我们需要触发类比,去分析预期为[0距果,吃掉],而实际为[距23果,吃不掉],从中类比得到[距23不是0,导致吃不到]的结果,那么这里其实一共就两个难点。 1. 由谁触发反省类比。 2. 如何触发反省类比。 3. 如何应用反省类比。
经分析,不难得到,第一个问题,由谁触发反省类比,自然是由决策行为后的实际输入来触发,或者简单说,决策系统的每轮循环都有权触发。
注:有一些触发并不源于实际输入,因为压根没输入,比如我看到妈妈做饭,还有大概五分钟就好了,结果我等了十分钟还没好,我就厨房看一下为什么。这里的触发,并不源于输入,而是源于超过预期时间,时序却还没有继续推进。
那么第二个问题也有答案了,即如何触发,其实是有一个生物钟的,比如飞起的我0.3秒内扣杀对方大中锋。但实际此事并未发生,我需要反省一下对方大中锋太牛pi了,还是犯规了,或者只是自己技术退步了。
第三个问题,关于反省类比的应用,显然我们做反省是为了防止在今后遇到同样的事情时,不要再一次犯同样的错,所以我们将反省类比的结果应用到PM算法的理性评价中。
代码实现:
1. 生物钟触发器:
综上,我们在决策每轮循环生成的短时记忆中,都附加一个生物钟触发器。
```objective-c /** * MARK:--------------------生物钟触发器-------------------- * @callers * 1. demand.ActYes处 (等待外循环mv抵消); * 2. 行为化Hav().HNGL.ActYes处 (等待外循环输入符合HNGL的概念) * 3. 行为输出ActYes处 (等待外循环输入推进下一帧概念) * @version * 2020.08.14: 支持生物钟触发器; * 1. timer计时器触发,取deltaT x 1.3时间; * 2. "计时触发"时,对触发者的ActYes状态进行判断,如果还未由外循环实际输入,则"实际触发"; * 3. 实际触发后,对预想时序fo 与 实际时序fo 进行反省类比; * x. 当outModel中某时序完成时,则追回(销毁)与其对应的触发器 (废弃,不用销毁,改变status状态即可); * x. 直到触发时,还未销毁,则说明实际时序并未完成,此时调用反省类比 (废弃,由commitFromOuterPushMiddleLoop()来做状态改变即可); * 2020.08.23: 改为由TOFoModel中setTimeTrigger方法替代; * 2020.09.03: 支持不设触发条件时,默认必触发的重载; * _param canTrigger : 触发条件; */ +(void) setTimeTrigger:(NSTimeInterval)deltaTime trigger:(void(^)())trigger{ [self setTimeTrigger:deltaTime canTrigger:nil trigger:trigger]; } +(void) setTimeTrigger:(NSTimeInterval)deltaTime canTrigger:(BOOL(^)())canTrigger trigger:(void(^)())trigger{ //1. 数据检查 if (!trigger) return;
//2. 用after延迟定时deltaT x 1.3触发;
CGFloat triggerTime = deltaTime / 1000.0f * 1.3f;
NSLog(@"---> 生物钟触发器: %f",triggerTime);
dispatch_after(dispatch_time(DISPATCH_TIME_NOW, (int64_t)(triggerTime * NSEC_PER_SEC)), dispatch_get_main_queue(), ^{
//3. 触发时,判断是否还是actYes状态 (在OuterPushMiddleLoop()中,会将ActYes且符合,且PM算法成功的,改为Finish);
if (canTrigger) {
if (canTrigger()) trigger();
}else{
trigger();
}
});
} ```
2. 决策流程控制:
在决策中,所有输出了行为后,我们将短时记忆中状态设为:ActYes,即等待现实世界返回结果,当生物钟触发器触发时,如果任务还未正常推进,则进行反省类比,代码如下:
```objective-c /** * MARK:--------------------ActYes的流程控制-------------------- * @desc : 当ActYes时,一般等待外循环反馈,而此处构建生物钟触发器,用于超时时触发反省类比; * 1. 调用AITime触发器; * 2. 当生物钟触发器触发时,如果未输入有效"理性推进" 或 "感性抵消",则对这些期望与实际的差距进行反省类比; * @callers * 1. demand.ActYes处 * 2. 行为化Hav().HNGL.ActYes处 * 3. 行为输出ActYes处 * @todo * 2020.08.31: 对isOut触发的,先不做处理,因为一般都能直接行为输出并匹配上,所以暂不处理; / -(void) singleLoopBackWithActYes:(TOModelBase)actYesModel { NSLog(@"\n\n=============================== 流程控制:ActYes ===============================\nModel:%@ %@",actYesModel.class,Pit2FStr(actYesModel.contentp)); if (ISOK(actYesModel, TOAlgModel.class)) { //1. TOAlgModel时; TOAlgModel algModel = (TOAlgModel)actYesModel; TOFoModel foModel = (TOFoModel)algModel.baseOrGroup; AIFoNodeBase *foNode = [SMGUtils searchNode:foModel.contentp]; if ([TOUtils isHNGL:actYesModel.contentp]) { //2. 如果TOAlgModel为HNGL时, NSInteger cutIndex = foNode.contentps.count - 1; int deltaTime = [NUMTOOK(ARR_INDEX(foNode.deltaTimes, cutIndex)) intValue];
//3. 触发器 (触发条件:未等到实际输入);
[AITime setTimeTrigger:deltaTime trigger:^{
AnalogyType type = (algModel.status == TOModelStatus_ActYes) ? ATSub : ATPlus;
[AIAnalogy analogy_ReasonRethink:foModel cutIndex:cutIndex type:type];
}];
}else if(actYesModel.content_p.isOut){
////2. 为行为输出时;
//int algIndex = [foNode.content_ps indexOfObject:algModel.content_p];
//int deltaTime = [NUMTOOK(ARR_INDEX(foNode.deltaTimes, algIndex)) intValue];
//
////b. 触发器
//[AITime setTimeTrigger:deltaTime canTrigger:^BOOL{
// //c. 触发条件: (未等到实际输入);
// return algModel.status == TOModelStatus_ActYes;
//} trigger:^{
// //1. 对已发生的 (< algIndex) 的部分收集sub稀疏码,构建ATSubAlg;
// //2. 对上述ATSubAlgs构建成ATSub时序;
//}];
}
}else if(ISOK(actYesModel, TOFoModel.class)){
//1. TOFoModel时,数据准备
TOFoModel *foModel = (TOFoModel*)actYesModel;
AIFoNodeBase *actYesFo = [SMGUtils searchNode:foModel.content_p];
DemandModel *demand = (DemandModel*)actYesModel.baseOrGroup;
//2. 触发器 (触发条件:任务未在demandManager中抵消);
[AITime setTimeTrigger:actYesFo.mvDeltaTime trigger:^{
AnalogyType type = (demand.status != TOModelStatus_Finish) ? ATSub : ATPlus;
[AIAnalogy analogy_ReasonRethink:foModel cutIndex:NSIntegerMax type:type];
}];
}
} ```
3. 反省类比算法:
当触发成功,我们将进行反省类比,即将当前哪些导致了推进成功,计为P。哪些导致了推进失败,计为S。代码如下: ```objective-c /** * MARK:--------------------反省类比-------------------- * @desc * 1. 其实并不真正进行类比,而是对决策中未PM修正的部分,直接构建Sub节点; * 2. 对已发生的 (cutIndex < algIndex) 的部分每一帧,收集未被PM修正的sub稀疏码,构建ATSubAlg (当前的两个调用者,都是全序列); * 3. 对上述ATSubAlgs构建成ATSub时序; * 4. 根据ATSubFo,从稀疏码向概念,再向时序索引查找,同样foNode的另外的assSubFo,并进行外类比 (目前仅简单的取时序的ATSub抽象); * 5. 外类比构建更确切的S时序,如果已存在,则加强; * * @callers * 1. ActYes流程控制的HNGL调用时,生物钟触发器触发成功时,理性分析什么导致了未成功 (cutIndex无用,因为全部用); * 2. ActYes流程控制的Demand调用时,生物钟触发器触发成功时,理性分析什么导致了未成功 (cutIndex无用,因为全部用); * @version * 2020.09.03: 支持ATPlus反省类比; / +(void) analogy_ReasonRethink:(TOFoModel)foModel cutIndex:(NSInteger)cutIndex type:(AnalogyType)type{ //1. 数据准备 if (!foModel || (type != ATSub && type != ATPlus)) return; AIFoNodeBase *foNode = [SMGUtils searchNode:foModel.content_p]; NSMutableArray *spFoContent = [[NSMutableArray alloc] init]; NSString *spDS = [ThinkingUtils getAnalogyTypeDS:type]; NSLog(@"\n\n=============================== 反省类比 ===============================\n%ld:时序:%@",(long)type,Fo2FStr(foNode));
//2. 构建SPAlg (触发反省类比_实际fo数据收集 (不用收集realFo,而是直接对未修正部分构建,参考20205-原则1));
for (TOAlgModel *toAlgModel in foModel.subModels) {
if (ISOK(toAlgModel, TOAlgModel.class)) {
//3. 取到 "未修正稀疏码" (参考20205-原则2);
NSArray *except_ps = [TOUtils convertPointersFromTOValueModelSValue:toAlgModel.subModels invalidStatus:@[@(TOModelStatus_Finish)]];
NSArray *notFinish_ps = [SMGUtils removeSub_ps:except_ps parent_ps:toAlgModel.justPValues];
//4. 未修正部分构建为: "SP概念"
AIAlgNodeBase *curAlg = [SMGUtils searchNode:toAlgModel.content_p];
if (!ARRISOK(notFinish_ps)) continue;
AIAbsAlgNode *spAlg = [theNet createAbsAlg_NoRepeat:notFinish_ps conAlgs:@[curAlg] isMem:false ds:spDS];
NSLog(@"createAlg: %@",Alg2FStr(spAlg));
//5. 收集SP概念_用于构建SP时序;
[spFoContent addObject:spAlg.pointer];
}else{
WLog(@"查下此处,为何fo的subModel不是algModel类型,如果2020.10之前未见过此警告,可取消打印此日志;");
}
}
//6. 构建SPFo
if (ARRISOK(spFoContent)) {
AINetAbsFoNode *spFo = [theNet createAbsFo_General:@[foNode] content_ps:spFoContent difStrong:1 ds:spDS];
NSLog(@"createFo: %@",Fo2FStr(spFo));
//7. 向性左向右,以当前foNode为交集指引,找assSPFo,以进行外类比 (参考20205-原则3);
NSArray *assSPFos = [SMGUtils convertPointersFromPorts:[AINetUtils absPorts_All:foNode type:type]];
assSPFos = [SMGUtils removeSub_p:spFo.pointer parent_ps:assSPFos];
assSPFos = ARR_SUB(assSPFos, 0, cRethinkActBack_AssSPFoLimit);
//8. 外类比;
if (spFo && ARRISOK(assSPFos)) {
for (AIKVPointer *item in assSPFos) {
AINetAbsFoNode *assSPFo = [SMGUtils searchNode:item];
[AIAnalogy analogyOutside:spFo assFo:assSPFo canAss:nil updateEnergy:nil type:type];
}
}
}
} ```
4. 应用反省类比:
在反省类比中,我们得到了结果SP,现在将SP应用到理性评价中,即避免下次再遇到同样的事情时,犯同样的错。代码如下:
```objective-c /** * MARK:--------------------理性评价-------------------- * @desc * 1. 对当前输入帧进行PM理性评价 (稀疏码检查,参考20063); * 2. 白话: 当具象要替代抽象时,对其多态性进行检查加工; * @param outModel : 因本文是验证其多态性,所以传入的outModel.cotent即M必须是P的抽象; * @version * 2020.07.02: 将outModel的pm相关字段放到方法调用前就处理好 (为了流程控制调用时,已经有完善可用的数据了); * 2020.07.14: 支持综合评价totalRefScore,因为不综合评价的话,会出现不稳定的BUG,参考20093; * 2020.07.16: 废除综合评价,改为只找出一条 (参考n20p10-todo1); * 2020.09.03: v2将反省类比的SP用于PM理性评价; * @result moveValueSuccess : 转移到稀疏码行为化了; * @bug * 2020.07.05: BUG,在用MatchConF.content找交集同区稀疏码肯定找不到,改为用MatchConA后,ok了; * 2020.07.06: 此处M.conPorts,即sameLevelAlgps为空,明天查下原因 (因为MC以C做M,C有可能本来就是最具象概念); * 2020.07.12: PM会加工"经"和"纬"的问题,改为在判断时,仅对指向了mv的fo做判断后修复,参考:20092; * 2020.07.13: fuzzyFo有时含多条同区码,导致其价值指向不确定,是否需加工判错,改成只判断单码后fix(如[距34,距0,吃]->{mv+},但显然距34并不能吃); / -(BOOL) reasonScorePM_V2:(TOAlgModel)outModel{ //1. 数据准备 if (!outModel || !outModel.pmFo) return false; AIAlgNodeBase *M = [SMGUtils searchNode:outModel.contentp]; AIFoNodeBase *mMaskFo = outModel.pm_Fo; if (!M) return false;
//3. 将理性评价数据存到短时记忆模型;
NSArray *except_ps = [TOUtils convertPointersFromTOValueModelSValue:outModel.subModels invalidStatus:nil];
NSArray *validJustPValues = [SMGUtils removeSub_ps:except_ps parent_ps:outModel.justPValues];
//4. 不用PM评价 (则交由流程控制方法,推动继续决策(跳转下帧/别的);
if (!ARRISOK(validJustPValues)) return false;
NSLog(@"\n\n=============================== PM ===============================\nM:%@\nMAtFo:%@",Alg2FStr(M),Fo2FStr(mMaskFo));
if (Log4PM) NSLog(@"---> P独特码:%@",Pits2FStr(outModel.justPValues));
if (Log4PM) NSLog(@"---> 不应期:%@",Pits2FStr(except_ps));
if (Log4PM) NSLog(@"---> P有效独特码:%@",Pits2FStr(validJustPValues));
//5. 取到首个P独特稀疏码 (判断是否需要行为化);
AIKVPointer *firstJustPValue = ARR_INDEX(validJustPValues, 0);
NSArray *sameLevelAlg_ps = [SMGUtils convertPointersFromPorts:[AINetUtils conPorts_All:M]];
BOOL firstPNeedGL = false;
if (firstJustPValue) {
//TODOTOMORROW: 20200903-将SP应用于PM理性评价
//5. 取得当前帧alg模型 (参考20206-示图) 如: A22(速0,高5,距0,向→,皮0);
TOAlgModel *curAlgModel = (TOAlgModel*)outModel.baseOrGroup;
AIAlgNodeBase *curAlg = [SMGUtils searchNode:curAlgModel.content_p];
//6. 取当前方案fo模型 (参考20206-示图) 如: P+新增一例解决方案: F23[A22(速0,高5,距0,向→,皮0),A1(吃1)]->M7{64};
TOFoModel *curFoModel = (TOFoModel*)curAlgModel.baseOrGroup;
AIFoNodeBase *curFo = [SMGUtils searchNode:curFoModel.content_p];
//7. 根据curFo取抽象SubFo3条,PlusFo3条;
NSArray *foSs = [SMGUtils convertPointersFromPorts:[AINetUtils absPorts_All:curFo type:ATSub]];
NSArray *foPs = [SMGUtils convertPointersFromPorts:[AINetUtils absPorts_All:curFo type:ATPlus]];
foSs = ARR_SUB(foSs, 0, cPM_CheckSPFoLimit);
foPs = ARR_SUB(foPs, 0, cPM_CheckSPFoLimit);
//8. 查对应在curAlg上是否长过教训S / 被助攻过P;
NSArray *algSs = [SMGUtils convertPointersFromPorts:[AINetUtils absPorts_All:curAlg type:ATSub]];
NSArray *algPs = [SMGUtils convertPointersFromPorts:[AINetUtils absPorts_All:curAlg type:ATPlus]];
//9. 从algSs中,筛选有效的部分validAlgSs
NSMutableArray *validAlgSs = [[NSMutableArray alloc] init];
for (AIKVPointer *item in foSs) {
AIFoNodeBase *sFo = [SMGUtils searchNode:item];
NSArray *itemValid = [SMGUtils filterSame_ps:sFo.content_ps parent_ps:algSs];
[validAlgSs addObjectsFromArray:itemValid];
}
//10. 从algPs中,筛选有效的部分validAlgPs
NSMutableArray *validAlgPs = [[NSMutableArray alloc] init];
for (AIKVPointer *item in foPs) {
AIFoNodeBase *pFo = [SMGUtils searchNode:item];
NSArray *itemValid = [SMGUtils filterSame_ps:pFo.content_ps parent_ps:algPs];
[validAlgPs addObjectsFromArray:itemValid];
}
//11. 从validAlgSs和validAlgPs中,以firstJustPValue同区稀疏码相近排序 (参考20206-步骤图);
NSMutableArray *allValidSPs = [SMGUtils collectArrA:validAlgSs arrB:validAlgPs];
NSArray *sortValidSPs = [ThinkingUtils getFuzzySortWithMaskValue:firstJustPValue fromProto_ps:allValidSPs];
//12. 将最接近的取出,并根据源于S或P作为理性评价结果,判断是否修正;
AIAlgNodeBase *mostSimilarAlg = ARR_INDEX(sortValidSPs, 0);
if (Log4PM) NSLog(@"----> firstJustPValue:%@ => S数:%lu P数:%lu 最相近:%@",Pit2FStr(firstJustPValue),validAlgSs.count,validAlgPs.count,Alg2FStr(mostSimilarAlg));
if ([validAlgSs containsObject:mostSimilarAlg.pointer]) {
//评价结果为S -> 需要修正
firstPNeedGL = true;
}
if ([validAlgPs containsObject:mostSimilarAlg.pointer]) {
//评价结果为P -> 无需修正
firstPNeedGL = false;
}
}
//TODOTOMORROW:
//1. 修正时,gl值也可以从S中获取;
//2. 将上面的Ss和Ps的代码进行封装;
//6. 不需要处理时,直接Finish,转至决策流程控制方法 (注:在TOValueModel构造方法中: proto中的value,就是subValue);
if (!firstPNeedGL) {
if (Log4PM) NSLog(@"-> 无需PM,转至流程控制Finish");
TOValueModel *toValueModel = [TOValueModel newWithSValue:firstJustPValue pValue:nil group:outModel];
toValueModel.status = TOModelStatus_NoNeedAct;
[self singleLoopBackWithFinishModel:toValueModel];
return true;
}
//7. 转至_GL行为化->从matchFo.conPorts中找稳定的价值指向;
NSMutableArray *matchConF_ps = [SMGUtils convertPointersFromPorts:[AINetUtils conPorts_All:mMaskFo]];
[matchConF_ps addObject:mMaskFo.pointer];//(像MC传过来的,mMaskFo为C所在的时序,有可能本身就是最具象节点,或包含了距0的果);
//8. 依次判断conPorts是否包含"同区稀疏码" (只需要找到一条相符即可);
for (AIKVPointer *matchConF_p in matchConF_ps) {
//9. 找到含同区稀疏码的con时序;
AIFoNodeBase *matchConF = [SMGUtils searchNode:matchConF_p];
//9. 找到含同区稀疏码的con概念;
AIKVPointer *matchConA_p = ARR_INDEX([SMGUtils filterSame_ps:sameLevelAlg_ps parent_ps:matchConF.content_ps], 0);
AIAlgNodeBase *matchConA = [SMGUtils searchNode:matchConA_p];
if (!matchConA) continue;
//9. 找到同区稀疏码的glValue;
AIKVPointer *glValue4M = [SMGUtils filterSameIdentifier_p:firstJustPValue b_ps:matchConA.content_ps];
//10. 价值稳定,则转_GL行为化 (找到一条即可,因为此处只管转移,后面的逻辑由流程控制方法负责);
BOOL sameIdent = [outModel.pm_MVAT isEqualToString:matchConF.cmvNode_p.algsType];
CGFloat matchConScore = [ThinkingUtils getScoreForce:matchConF.cmvNode_p ratio:1.0f];
if (glValue4M && sameIdent && matchConScore > 0) {
if (Log4PM) NSLog(@"-> 操作 Success:(%@->%@)",Pit2FStr(firstJustPValue),Pit2FStr(glValue4M));
TOValueModel *toValueModel = [TOValueModel newWithSValue:firstJustPValue pValue:glValue4M group:outModel];
outModel.sp_P = M;
[self singleLoopBackWithBegin:toValueModel];
return true;
}else{
if (Log4PM) NSLog(@"-> 操作 ItemFailure:(%@->%@) conF:%@ conA:%@",Pit2FStr(firstJustPValue),Pit2FStr(glValue4M),Fo2FStr(matchConF),Alg2FStr(matchConA));
}
}
//11. 未找到GL的目标 (如距离0),直接计为失败;
if (Log4PM) NSLog(@"-> 未找到GL目标,转至流程控制Failure");
TOValueModel *toValueModel = [TOValueModel newWithSValue:firstJustPValue pValue:nil group:outModel];
toValueModel.status = TOModelStatus_ActNo;
[self singleLoopBackWithFailureModel:toValueModel];
return true;
}
```
总结:
综上,本文共分两步:
第一步:本文通过实际问题出发,分析出问题的原因,并将问题回归到HE的信息熵减机模型中,在循环的角度分析出问题所在。
第二步:从理论模型的角度发现问题所在后,我们再回归模型细节,即反省类比。然后再规划到生物钟触发器、决策流程控制、类比算法、PM理性评价,并将规划写成代码。
本文的完成并不是真正的结束,后续关于测试和训练结果,有时间我再附至文末。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢