
【标题】Towards Human-Level Bimanual Dexterous Manipulation with Reinforcement Learning
【作者团队】Yuanpei Chen, Yaodong Yang, Tianhao Wu, Shengjie Wang, Xidong Feng, Jiechuang Jiang, Stephen Marcus McAleer, Hao Dong, Zongqing Lu, Song-Chun Zhu
【发表日期】2022.6.17
【论文链接】https://arxiv.org/pdf/2206.08686.pdf
【Demo链接】 https://github.com/PKU-MARL/DexterousHands
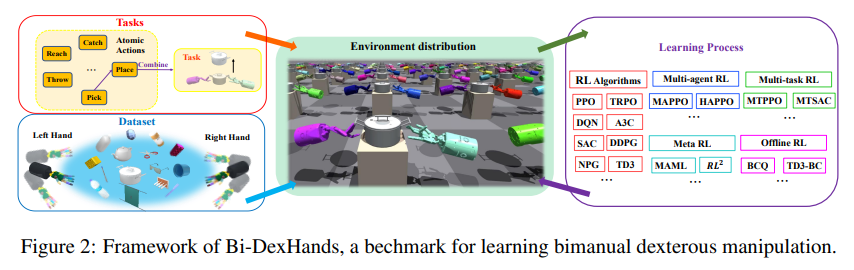
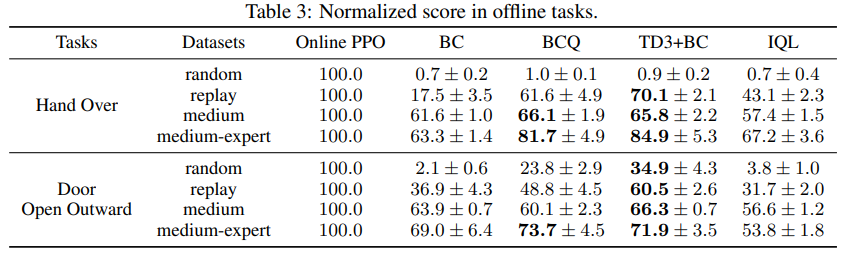
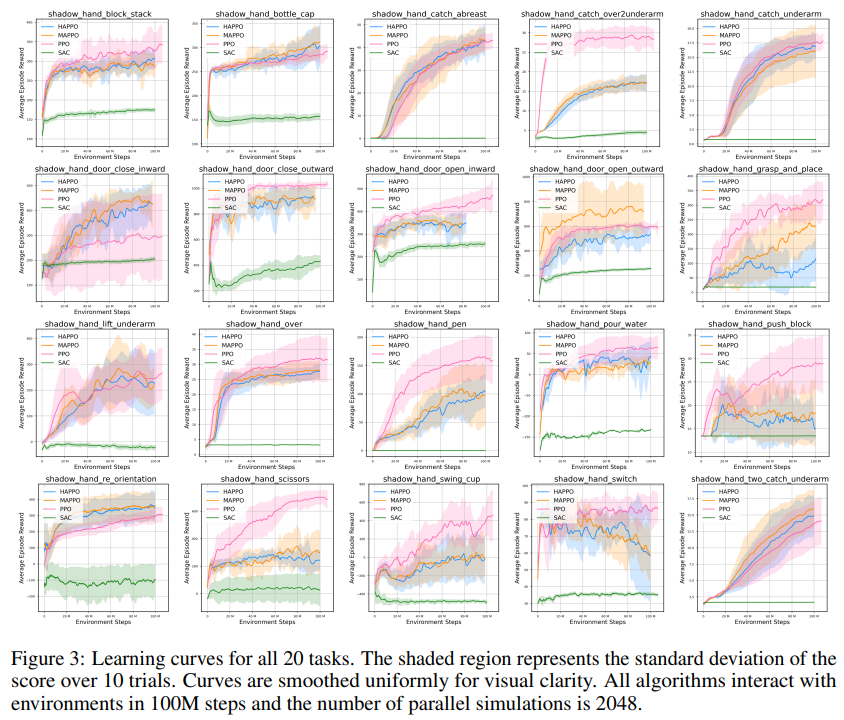
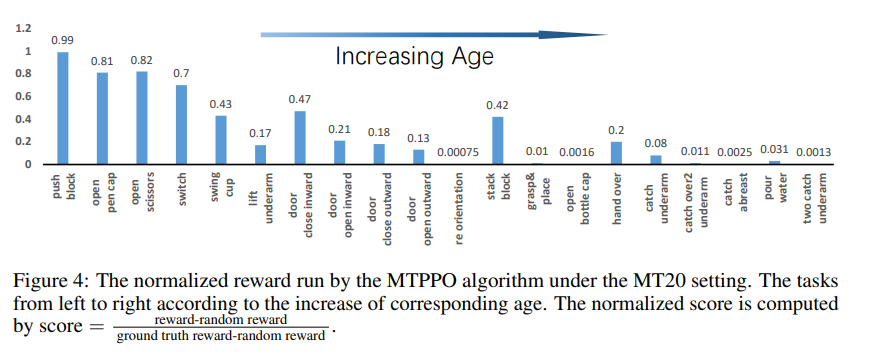
【推荐理由】实现人类水平的灵巧性是机器人学中一个重要的开放性问题。本文提出了双手灵巧手基准测试(Bi-Dexthands),一个模拟器,包括两个灵巧手和数十个双手操作任务和数千个目标对象。据研究,双手任务的设计是为了匹配不同水平的人类运动技能。本文在 Issac Gym 建造了 Bi-DexHands;这可以实现高效的RL训练,仅使用一台NVIDIA RTX 3090即可达到30000多帧/秒。我们为不同设置下流行的RL算法提供了一个全面的基准;这包括单/多智能体RL、离线RL、多任务RL和元RL。研究结果表明,PPO类型的策略算法可以掌握相当于48个月大人类婴儿的简单操作任务(例如,捕捉飞行物体、打开瓶子),而多智能体RL可以进一步帮助掌握需要熟练双手合作的操作(例如,提壶、堆叠积木)。尽管在每项任务上都取得了成功,但当涉及到获得多种操作技能时,现有的RL算法在大多数多任务和少数快照学习环境中都无法工作,这需要RL社区进行更实质性的发展。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢