
【标题】Traffic Management of Autonomous Vehicles using Policy Based Deep Reinforcement Learning and Intelligent Routing
【作者团队】Anum Mushtaq, Irfan ul Haq, Muhammad Azeem Sarwar, Asifullah Khan, Omair Shafiq
【发表日期】2022.6.28
【论文链接】https://arxiv.org/pdf/2206.14608.pdf
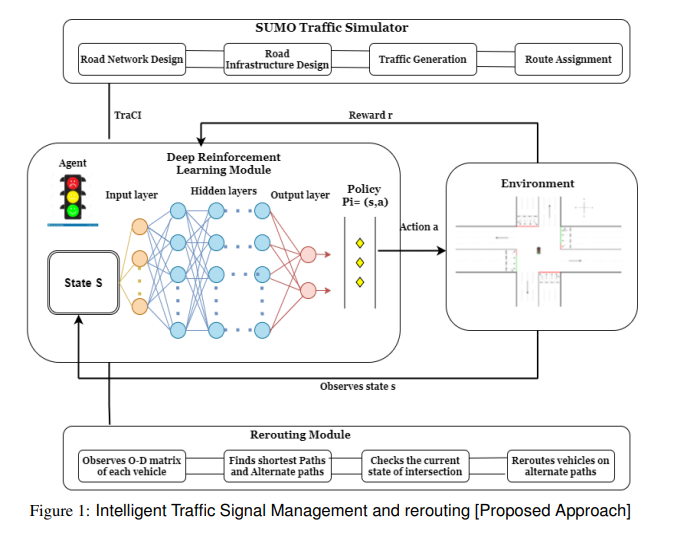
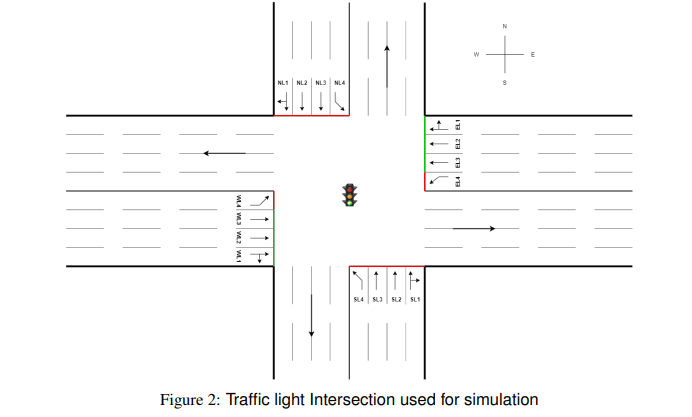
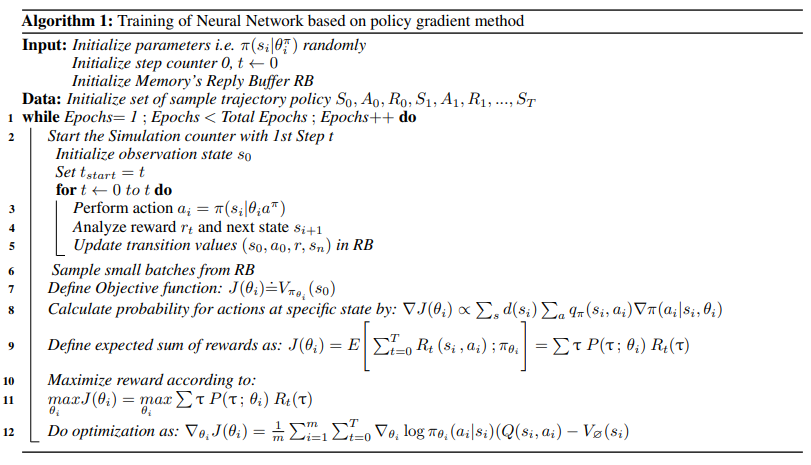
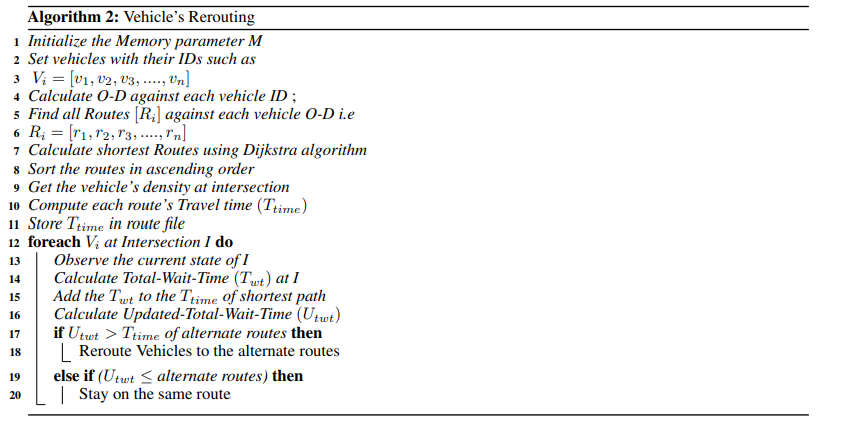
【推荐理由】深度强化学习(DRL)使用多种非结构化数据,使RL能够在高维环境中学习复杂的策略。基于自动驾驶汽车 (AV) 的智能交通系统 (ITS) 为基于策略的 DRL 提供了绝佳的场所。深度学习架构解决了传统算法的计算挑战,并有助于在现实世界中采用和自动驾驶汽车 (AV) 。AV实施中的主要挑战是,若无可靠有效的管理,它可能会加剧道路上的交通拥堵。考虑到每辆车的整体效果,并使用高效可靠的技术,以优化交通流管理和减少拥堵。故本文提出了智能交通控制系统,以处理交叉口和交叉口后面的复杂交通拥堵场景。通过基于DRL的信号控制系统,该系统根据当前十字路口的拥堵情况动态调整交通信号。为解决交叉口后面道路的拥堵问题,本文使用了重新路由技术来平衡道路网络上的车辆负载。通过打破了数据孤岛,将来自传感器、探测器、车辆和道路的所有数据结合使用,以实现可持续的结果。最后使用SUMO微型模拟器进行模拟。结果表明了该方法具有重要意义。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢