
【标题】Retro-RL: Reinforcing Nominal Controller With Deep Reinforcement Learning for Tilting-Rotor Drones
【作者团队】I Made Aswin Nahrendra, Christian Tirtawardhana, Byeongho Yu, Eungchang Mason Lee, Hyun Myung
【发表日期】2022.7.7
【论文链接】https://arxiv.org/pdf/2207.03124.pdf
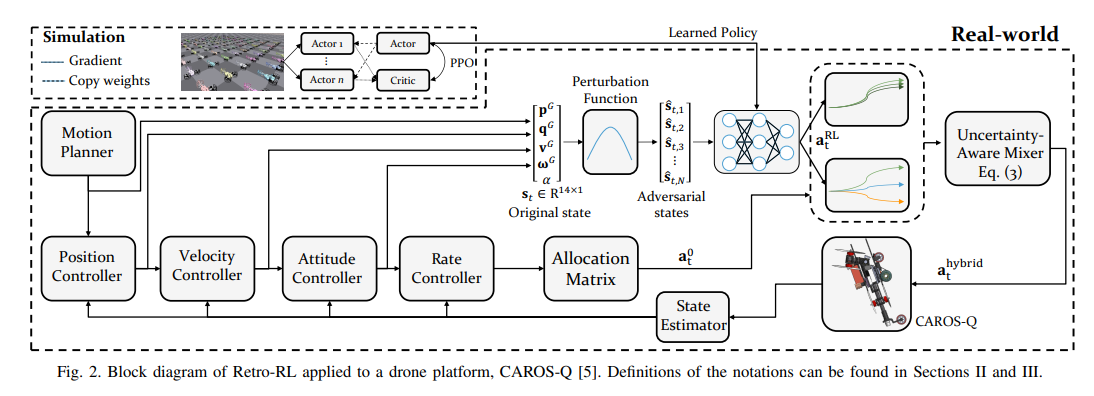
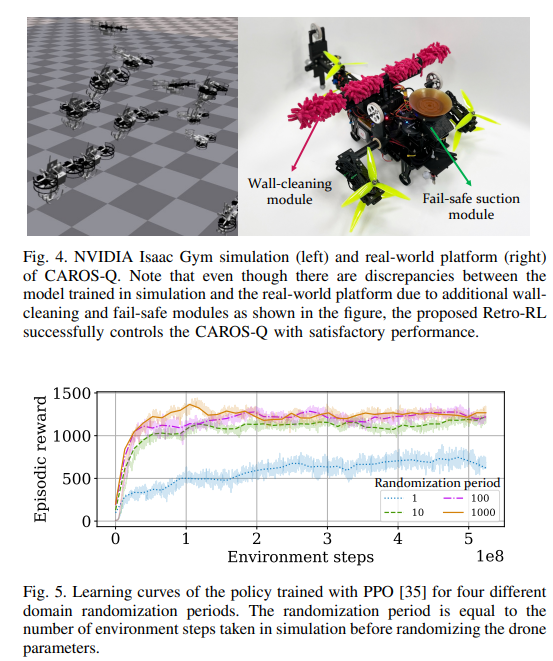
【推荐理由】将无人机应用扩展到复杂任务的研究需要稳定的控制框架。最近,深度强化学习(RL)算法已被用于机器人控制以完成复杂任务的许多研究中然而,深度 RL 算法可能不适合直接部署到现实世界的机器人平台中,因为难以解释学习到的策略并且缺乏稳定性保证,尤其是对于爬墙无人机等复杂任务。本文提出了一种新颖的混合架构,该架构通过使用无模型深度 RL 算法学习的稳健策略来增强标称控制器。所提出的架构采用了不确定性感知控制混合器来保证标称控制器的稳定性,同时使用学习策略的扩展鲁棒性能。该策略在具有数千个域随机化的模拟环境中进行训练,以在各种不确定性下实现稳健的性能。通过实际实验验证了所提出方法的性能,然后与传统控制器和使用 vanilla deep RL 算法训练的基于学习的最先进控制器进行了比较。

内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢