
【标题】Vessel-following model for inland waterways based on deep reinforcement learning
【作者团队】Fabian Hart, Ostap Okhrin, Martin Treiber
【发表日期】2022.7.7
【论文链接】https://arxiv.org/pdf/2207.03257.pdf
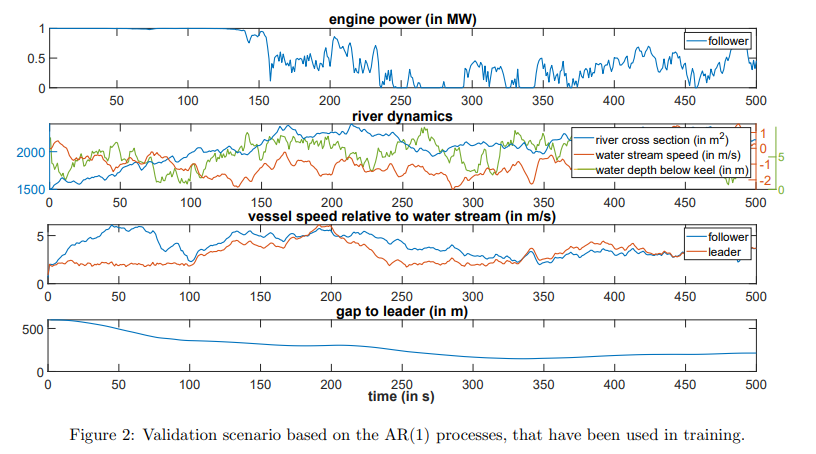
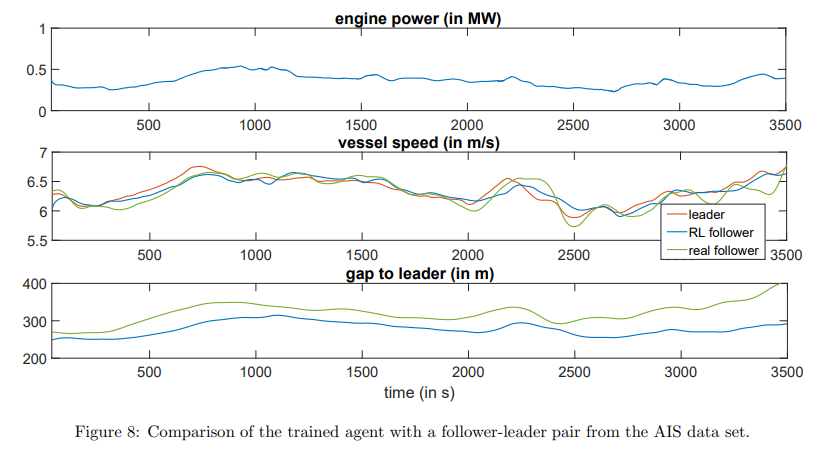
【推荐理由】虽然深度强化学习(RL)在过去几年中越来越多地应用于设计跟驰模型,但本研究旨在研究基于深度强化学习的车辆跟驰在复杂车辆动力学和强环境干扰下的可行性。作为一个用例,本文提出了基于真实船舶动力学的内河航道船舶跟踪模型,该模型考虑了环境影响,例如变化的流速和河流剖面。并从匿名AIS数据中提取自然船舶行为,以制定一个奖励函数,该函数反映了舒适和安全导航旁边的真实驾驶风格。为了提高泛化能力,又提出了一种RL训练环境,该环境使用随机过程来建模引导轨迹和河流动力学。为了验证训练模型,又定义了训练中未看到的不同场景,包括在莱茵河中部的真实船只跟随。该模型演示了在所有场景中安全舒适的驾驶,证明了良好的泛化能力。此外,通过将训练后的模型部署在一系列后续船舶上,可以有效地抑制交通波动。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢