活动
论文
风云榜
专栏
知识树
项目
社交
登录/注册
强化学习大牛Sergey Levine新作:三个大模型教会机器人认路
RL
论文
苦行僧 2022-07-24 12:53 分享
以下文章来源于mp.weixin.qq.com
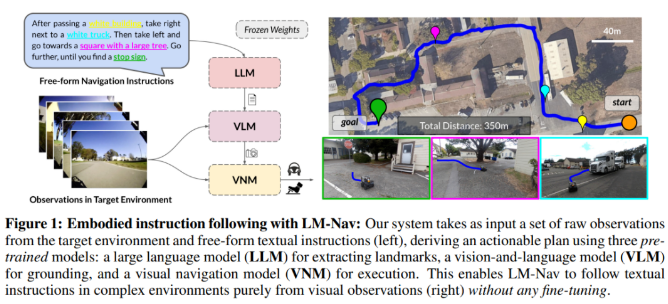
在一篇最新的论文中,UC 伯克利、谷歌等机构的研究者旨在结合这两种方法的优势,使机器人导航的自监督系统能够适用于没有任何用户注释的导航数据,利用预训练模型的能力来执行自然语言指令。研究者使用这些模型来构建一个「界面」,用来向机器人传达任务。这个系统借助于预训练的语言和视觉 - 语言模型的概括能力,使机器人系统能够接受复杂的高级指令。
论文链接:
https://arxiv.org/pdf/2207.04429.pdf
代码链接:
https://github.com/blazejosinski/lm_nav
内容中包含的图片若涉及版权问题,请及时与我们联系删除
点赞
收藏
评论
分享到Link
举报反馈
举报类型(必选)
样式问题
涉嫌广告
内容抄袭
内容侵权
政治相关
内容涉黄
其他
举报详情(选填)
0/200
评论列表
沙发等你来抢
去评论
评论
登录
后可提问交流
沙发等你来抢


评论
沙发等你来抢