
在现实世界的城市环境中进行运动预测是自主机器人的一项重要任务,包括预测车辆和行人在内的交通主体的未来轨迹,这对于自动驾驶领域的安全、舒适和高效操作来说绝对至关重要。运动预测任务传统上是基于运动学约束和具有手工规则的道路地图信息,然而这些方法无法捕捉复杂场景中的长期行为以及与地图结构和其他交通代理的交互。在论文"SSL-Lanes: Self-Supervised Learning for Motion Forecasting in Autonomous Driving"中,作者提出了一个基于自监督学习的运动预测模型,算法已经开源。
1. 论文信息

原文链接:https://arxiv.org/abs/2206.14116
代码链接:https://github.com/AutoVision-cloud/SSL-Lanes
2. 摘要
自监督学习(SSL)是一种新兴的技术,已经被成功地用于训练卷积神经网络(CNNs)和图神经网络(GNNs),以获得更可转移的、可推广的和鲁棒的表示学习。然而,它在自动驾驶运动预测方面的潜力很少被探索。在这项研究中,我们报告了第一次将自监督纳入运动预测的系统的探索和评估。我们首先提出研究四种新的用于运动预测的自监督学习任务,并在具有挑战性的大规模Argoverse数据集上进行理论基础和定量定性比较。其次,我们指出,我们的基于SSL的辅助学习设置不仅在性能精度方面优于使用transformer、复杂的融合机制和复杂的在线密集目标候选优化算法的预测方法,也具有较低的推理时间和架构复杂度。最后,我们进行了几个实验来理解为什么SSL改进了运动预测。
3. 算法分析
如图1所示是作者提出的自监督框架,图2是自监督任务总结,包括4种不同的自监督任务。SSL-Lanes框架的目标是通过同时学习各种自学习来提高主要运动预测基线的性能。
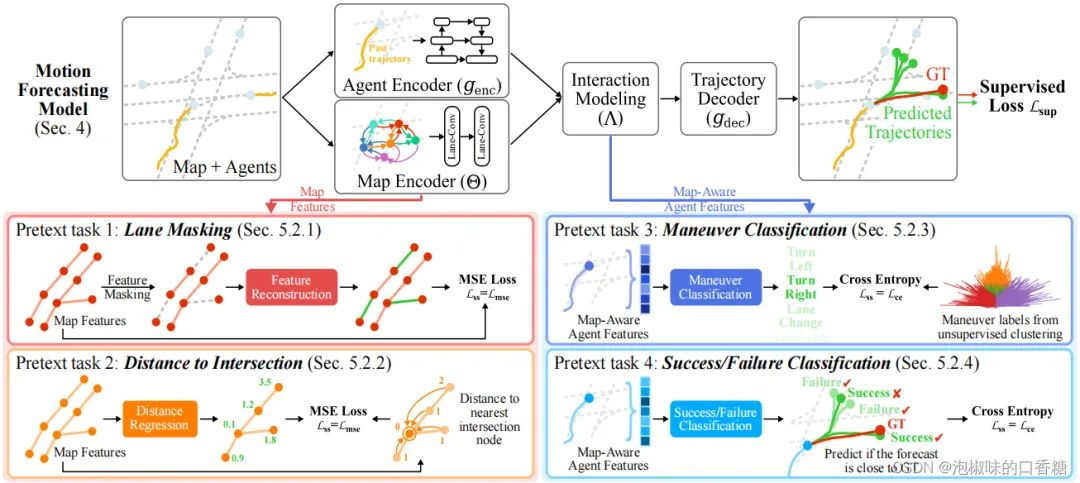
图1 通过联合训练进行运动预测自监督的总体框架

表1 自监督(SSL)任务概述
SSL-Lanes首次系统地研究了如何将自监督整合到标准的数据驱动的运动预测模型中,作者工作的主要贡献如下:
(1) 证明了在运动预测中引入自监督学习的有效性。由于在推理过程中没有增加额外的参数或计算,SSL-Lanes在具有挑战性的大规模Argoverse上实现了最佳的准确性-简单性-效率平衡。
(2) 基于运动预测问题的性质,作者提出了四个自监督任务。关键思想是利用易于访问的地图/代理级别的信息来定义特定领域的借口任务,这些任务鼓励标准模型捕捉更高级和可概括的预测表示。
(3) 作者进一步设计实验来探究为什么预测从SSL中获益,并提供了大量的结果来假设SSL-Lanes从SSL训练中学习到了比用普通监督学习训练的模型更丰富的特征。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢