
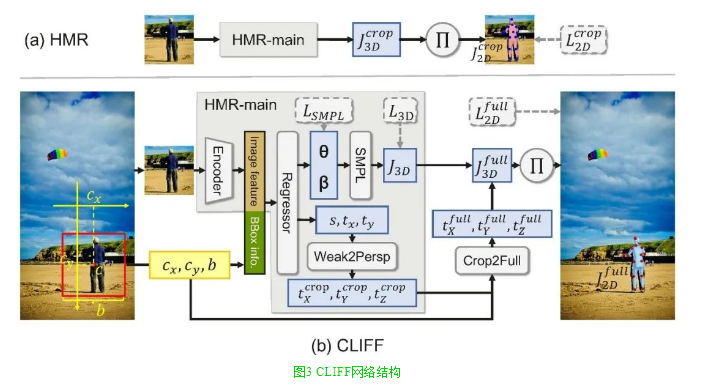
随着AR/VR、数字人等技术及应用的崛起,人体动作捕捉相关的研究越来越受到学术界和工业界的关注,尤其是基于单目视觉的方案,因其便携易用而引起更多的关注。近日,华为诺亚方舟实验室计算机视觉团队提出了新的动作捕捉算法CLIFF,基于HMR网络结构,在网络输入和监督信号中引入裁剪框的全局位置,同时使用新的方法构造人体动作捕捉伪标注,可以降低估计误差40%以上,实验结果在AGORA榜单上排第一名(截止至2022年6月)。其在网络中引入全局位置的思想及开放的伪标注数据可应用在其他单目视觉估计3D模型任务上,相关论文已被计算机视觉顶级会议ECCV 2022接收为Oral报告(录用率2.7%)。
论文链接:https://arxiv.org/pdf/2208.00571.pdf
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢