
【标题】DL-DRL: A double-layer deep reinforcement learning approach for large-scale task scheduling of multi-UAV
【作者团队】Xiao Mao, Guohua Wu, Mingfeng Fan
【发表日期】2022.8.4
【论文链接】https://arxiv.org/pdf/2208.02447.pdf
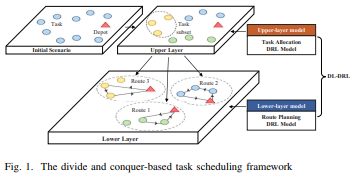
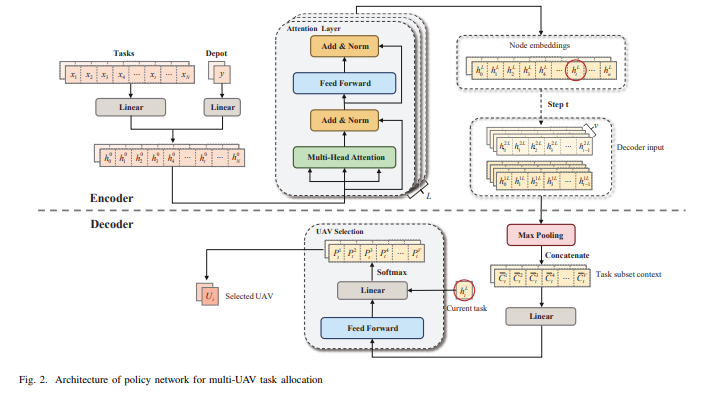
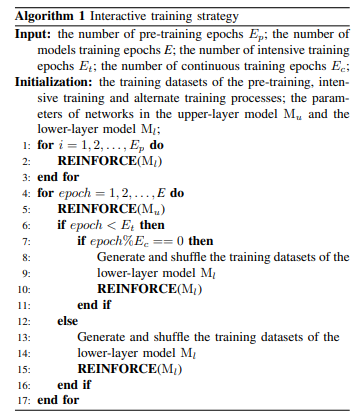
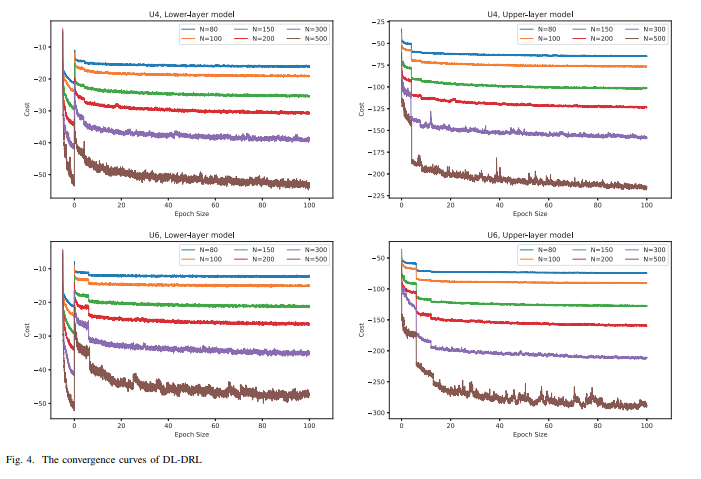
【推荐理由】本文研究了针对多架无人机(UAV)的任务调度问题的深度强化学习(DRL)。现有方法通常使用精确和启发式算法来解决问题,而计算时间随着任务规模的增长而迅速增加,并且启发式规则需要手动设计。本文提出基于分治的框架(DCF),将原始问题解耦为任务分配和无人机路线规划子问题,基于 DCF提出了双层深度强化学习方法(DL-DRL),其中上层 DRL 模型旨在将任务分配给适当的无人机和下层 DRL 模型[即广泛使用的注意力模型(AM)]用于生成可行的无人机路线。进而提出交互式训练策略(ITS),其中整个训练过程包括预训练、强化训练和交替训练过程。实验结果表明, DL-DRL 优于基于学习的主流方法和大多数传统方法,并且与最先进的启发式方法 [即 OR-Tools] 具有竞争力。DL-DRL 的强大通用性也通过将针对问题规模学习到的模型测试到更大的问题来验证。消融研究表明 ITS 可以在模型性能和训练持续时间之间取得折衷。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢