
【标题】CathSim: An Open-source Simulator for Autonomous Cannulation
【作者团队】Tudor Jianu, Baoru Huang, Mohamed E. M. K. Abdelaziz, Minh Nhat Vu, Sebastiano Fichera, Chun-Yi Lee, Pierre Berthet-Rayne, Ferdinando Rodriguez y Baena, Anh Nguyen
【发表日期】2022.8.2
【论文链接】https://arxiv.org/pdf/2208.01455.pdf
【demo链接】https://github.com/tudorjnu/cathsim
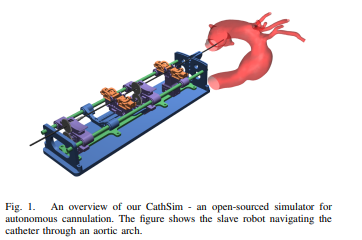
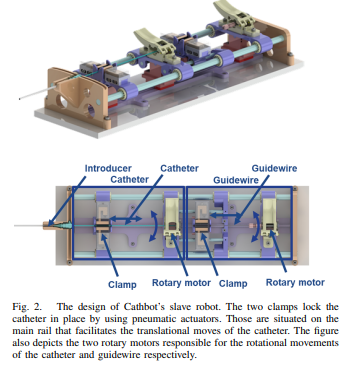
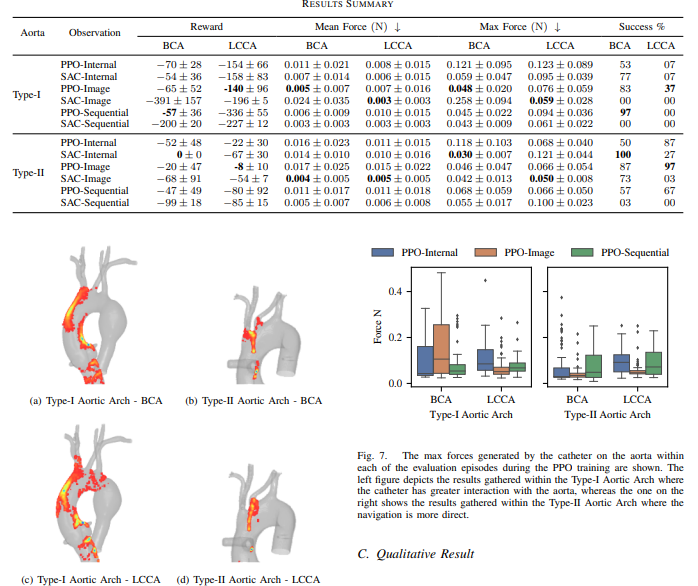
【推荐理由】血管内手术中的自主机器人有可能安全可靠地导航循环系统,同时降低对人为错误的敏感性。然而,在训练此类机器人的过程中存在许多挑战,例如由于机器学习算法的样本效率低下导致的训练时间长以及导管与血管内模型之间的相互作用引起的安全问题。物理模拟器已用于血管内手术,但通常用于员工培训,通常不符合自主插管目标。此外,当前大多数模拟器都是闭源的,这阻碍了安全可靠的自主系统的协作开发。本文介绍了 CathSim开源模拟环境,可加速自主血管内导航机器学习算法的开发。其首先使用最先进的血管内机器人模拟高保真导管和主动脉。然后,在模拟环境中提供导管和主动脉之间的实时力传感能力。并使用近端策略优化 (PPO) 和软演员-评论家 (SAC)算法,通过在两条主要动脉内执行两项不同的导管插入任务来验证该模拟器。实验结果表明,使用此开源模拟器,可成功地训练强化学习智能体执行不同的自主插管任务。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢