
【标题】Fairness Based Energy-Efficient 3D Path Planning of a Portable Access Point: A Deep Reinforcement Learning Approach
【作者团队】Nithin Babu, Igor Donevski, Alvaro Valcarce, Petar Popovski, Jimmy Jessen Nielsen, Constantinos B. Papadias
【发表日期】2022.8.10
【论文链接】https://arxiv.org/pdf/2208.05265.pdf
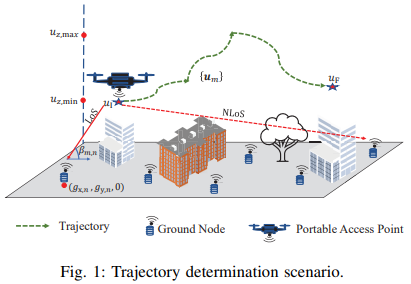
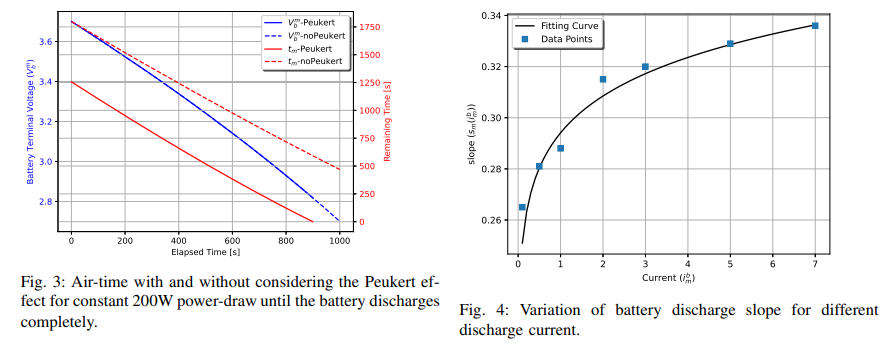
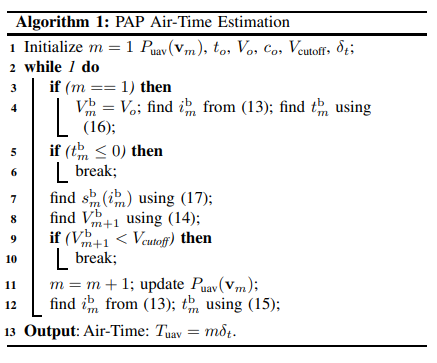
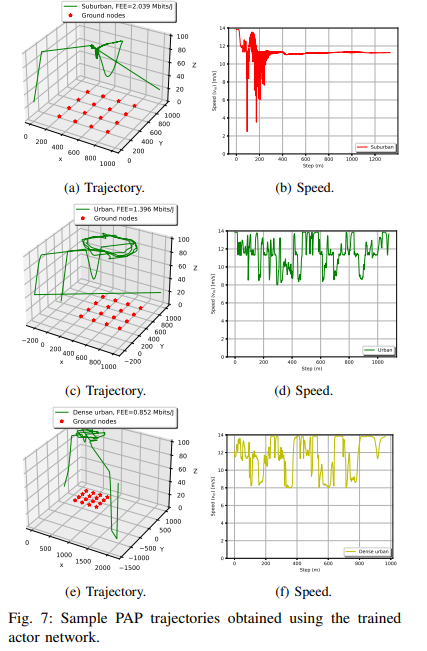
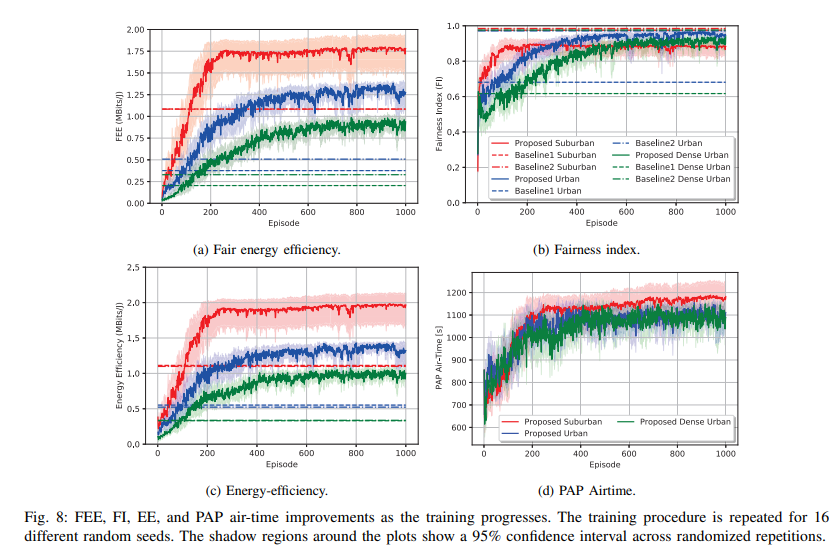
【推荐理由】本文优化了基于无人机 (UAV) 的便携式接入点 (PAP) 的 3D 轨迹,该接入点为一组地面节点 (GN) 提供无线服务。根据 Peukert 效应,考虑了无人机电池的实用非线性电池放电。提出公平能源效率(FEE)。考虑到解决方案空间的复杂性,并使用双延迟深度确定性策略梯度 (TD3) 演员-评论家深度强化学习 (DRL) 框架来学习最大化系统 FEE 的策略。通过执行两种类型的 RL 训练来展示该方法的有效性:第一种(离线)方法在整个训练阶段保持 GN 的位置相同;第二种方法通过在每次训练后改变 GN 的位置,将学习到的策略推广到任何 GN 排列。数值评估表明,忽略 Peukert 效应会高估 PAP 的飞行时间,可以通过优化选择 PAP 的飞行速度来解决。此外,注意到郊区、城市和密集城市环境的 FEE 比基线情景分别提高了 88.31%、272.34% 和 318.13%。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢