【标题】Path Planning of Cleaning Robot with Reinforcement Learning
【作者团队】Woohyeon Moon, Bumgeun Park, Sarvar Hussain Nengroo, Taeyoung Kim, Dongsoo Har
【发表日期】2022.8.17
【论文链接】https://arxiv.org/ftp/arxiv/papers/2208/2208.08211.pdf
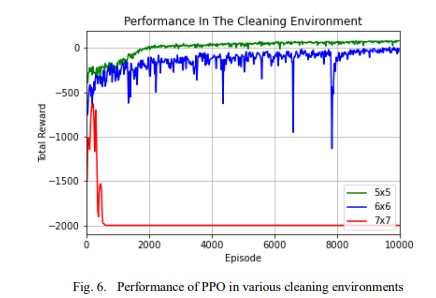
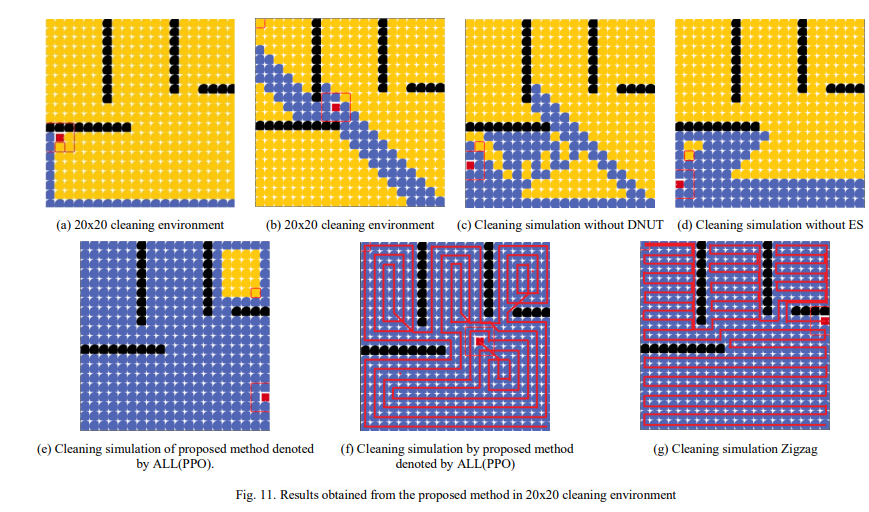
【推荐理由】近期,随着对清洁机器人的需求稳步增长,家庭用电量也在不断增加。为了解决耗电问题,清洁机器人的高效路径规划问题变得很重要,并且已经进行了许多研究。然而,它们中的大多数都是关于沿着简单的路径段移动,而不是关于清理所有地方的整个路径。RL已被用于清洁机器人。但RL 模型仅在特定的清洁环境中运行,而不是在各种清洁环境中运行。每当清洁环境发生变化时,模型都必须重新训练。为此,近端策略优化 (PPO) 算法与在各种清洁环境中运行的有效路径规划相结合,使用迁移学习 (TL)、检测最近清洁瓷砖、奖励整形和制作精英集方法。该方法通过消融研究得到验证,并与传统方法(如随机法和锯齿法)进行比较。实验结果表明,与原始PPO相比,其提高了训练性能和收敛速度。并且还证明了该方法比传统方法(随机、锯齿)具有更好的性能。
内容中包含的图片若涉及版权问题,请及时与我们联系删除


评论
沙发等你来抢