
同济大学机器人与人工智能实验室(RAIL)近期发表的 3DV 2022 Oral 论文 《SDA-SNE: Spatial Discontinuity-Aware Surface Normal Estimation via Multi-Directional Dynamic Programming》提出一个基于多向动态规划和迭代 多项式插值的端到端法向量估计方法,性能远超现有 SoTA 算法!代码已开源!
详细信息如下:
- 项目官网:https://mias.group/SDA-SNE/
- 论文链接:https://arxiv.org/abs/2208.08667
- 代码链接:https://github.com/ryming2001/SDA-SNE
- 演示视频:https://www.bilibili.com/video/BV1fN4y1G7AC
1. 引言
目前最先进的表面法向量估计方法(SNEs)通常以端到端的方式将深度图像映射为表面3D法向量场。虽然这些法向量估计方法极大地平衡了效率和精度,但它们在空间不连续处(如物体边缘、脊)的性能仍然不能令人满意。为了解决这一问题,本文首先引入了一种全新的多向动态规划策略,通过最小化(路径)平滑度能量来自适应地确定内点(与被估点共面的三维邻域点);然后,设计了迭代多项式插值算法,精细化迭代求解深度梯度,以助于产生精度更高的表面3D法向量。本文引入的空间不连续区域自感知(SDA)深度梯度优化策略可以与任何现有的深度估法向量的SNE兼容。本文提出的SDA-SNE比其他所有SoTA的方法取得了更好的性能,尤其是在空间不连续处区域上。
本文进一步评估了SDA-SNE在不同迭代次数下的性能,结果表明它只经过少数几次迭代就能迅速收敛。这确保了它在几乎不损失精度的前提下具有较好的实时性。此外,本文对数据集加入不同程度的噪声,来验证SDA-SNE具有良好的鲁棒性和环境适应性。本文的代码、演示视频和补充材料均可以在https://mias.group/SDA-SNE/上公开获得。
表面法向量是一种信息丰富的三维视觉特征,被广泛地用于如位姿估计、目标定位、场景理解等各种计算机视觉和机器人技术应用。作为其他计算机视觉任务和机器人技术应用的一种辅助估计手段,迄今为止,表面法向量估计任务还没有被广泛、深入的研究。由于这种应用场景通常需要良好的鲁棒性和较高的实时性,表面法向量估计方法必须拥有足够的精度和计算效率。
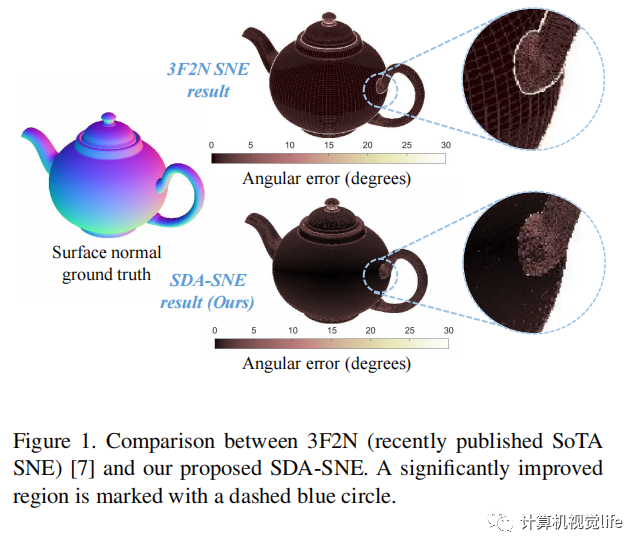
目前,最先进的表面法向量估计方法通常选择一组三维点,并通过平面拟合、几何变换或统计分析来计算表面法线。然而,这种方法无法估计空间不连续处(如边缘和脊)的表面法向量(如图1所示),因为它们通常会在不同的空间曲面上引入相邻的三维点。Bormann等人提出了第一个边缘感知SNE,能够自适应地选择同一表面上合理的相邻三维点,因此其在边缘处的表现明显优于其他现有法向量估计算法。尽管如此,他们的方法只关注边缘处法向量估计,并且需要手动设置一个边缘感知阈值。这导致了其对不同场景和数据集的适应性较低。因此,开发一种能够处理所有类型的空间不连续性的表面法向量估计方法,以实现高鲁棒性和环境适应性,具有重要的现实意义和应用价值。
2.算法详解
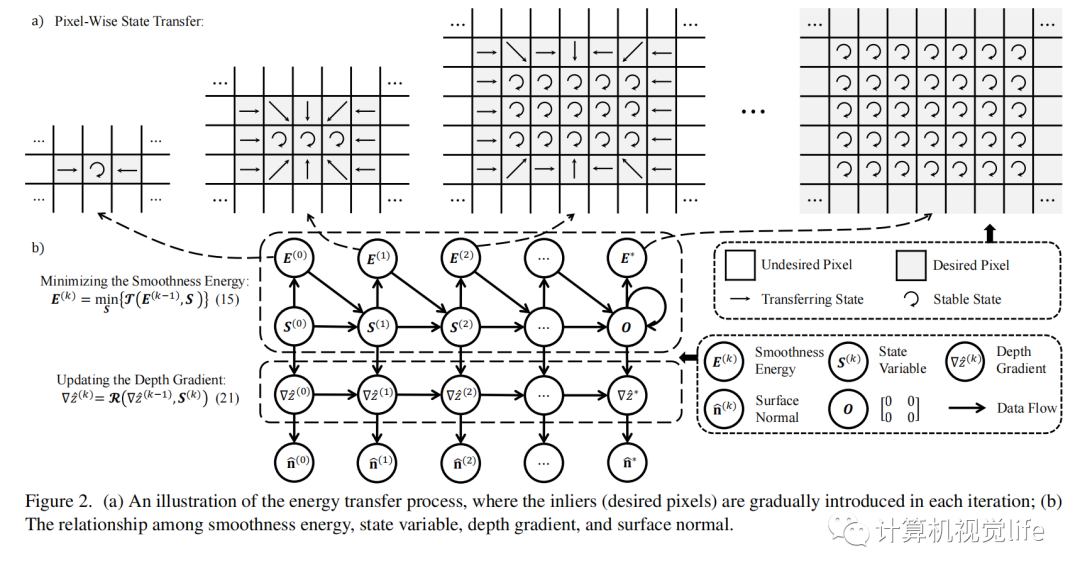
上图展示了本文提出的SDA-SNE的算法原理和流程,其通过对目标点的多个方向(水平、垂直、倾斜)上的邻域点进行动态规划,筛选出最优内点集合,然后利用迭代多项式插值算法,优化表面3D法向量估计,进而达到超高精度的法向量估计值。在本节中,主要介绍多向动态规划算法、路径平滑范数、迭代多项式插值算法,三者共同完成深度梯度估计过程。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢