
1摘要
近年来,自动驾驶因其减轻驾驶员负担、提高行车安全的潜力而受到越来越多的关注。在现代自动驾驶系统中,感知系统是不可或缺的组成部分,旨在准确估计周围环境的状态,并为预测和规划提供可靠的观察结果。3D目标检测可以智能地预测自动驾驶车辆附近关键3D目标的位置、大小和类别,是感知系统的重要组成部分。本文回顾了应用于自动驾驶领域的3D目标检测的进展。首先,我们介绍了3D目标检测的背景并讨论了该任务中的一些挑战。其次,我们从模型和传感器输入方面对3D目标检测的进展进行了全面调查,包括基于LiDAR、基于相机和多模态检测方法。我们还对每一类方法的潜力和挑战进行了深入分析。此外,我们系统地研究了3D目标检测在驾驶系统中的应用。最后,我们对3D目标检测方法进行了性能分析,并进一步总结了多年来的研究趋势,展望了该领域的未来方向。
https://arxiv.org/abs/2206.09474
2简述
自动驾驶,旨在使车辆智能地感知周围环境,并在很少或无需人力的情况下安全行驶,近年来取得了快速发展。自动驾驶技术已广泛应用于自动驾驶卡车、无人驾驶出租车、送货机器人等多种场景,能够减少人为错误,提高道路安全。作为自动驾驶系统的核心组成部分,车辆感知通过各种传感器输入帮助自动驾驶汽车了解周围环境。感知系统的输入一般是多模态数据(来自摄像头的图像数据、来自LiDAR的点云、高精地图等),并且会预测道路上关键要素的几何和语义信息。高质量的感知结果可作为轨迹预测和路径规划等后续步骤的可靠依据。
为了全面了解驾驶环境,感知系统涉及到许多视觉任务,例如目标检测和跟踪、车道线检测、语义和实例分割等。在这些感知任务中,3D目标检测是车辆感知系统中最不可或缺的任务之一。3D目标检测旨在预测3D空间中关键目标的位置、大小和类别,例如机动车、行人、骑自行车的人等。与仅在图像上生成2D边界框并忽略目标与本车的实际距离信息的2D目标检测相比,3D目标检测侧重于对真实世界3D坐标系中目标的定位和识别。3D目标检测在现实世界坐标中预测的几何信息可以直接用于测量本车与关键目标之间的距离,并进一步帮助规划行驶路线和避免碰撞。
3D目标检测方法随着深度学习技术在计算机视觉和机器人领域的发展而迅猛发展。现有的3D目标检测方法都试图从特定方面解决3D目标检测问题,例如从特定传感器类型,数据表示等,与其他类别的方法缺乏系统的比较。因此综合分析各种类型的3D目标检测方法的优缺点,可以为相关研究人员提供一些参考。基于此目的,本文全面回顾了自动驾驶应用中的3D目标检测方法,并对不同方法进行深入分析和系统比较。与现有的综述文章[5, 139, 215]相比,本文广泛涵盖了该领域的最新进展,例如基于深度图像的3D目标检测、自/半/弱监督3D目标检测、端到端自动驾驶系统中的3D目标检测等。与之前仅关注点云[88、73、338]、单目图像[297、165]和多模态输入[ 284]相比,我们的论文系统地研究了来自所有传感器类型和大多数应用场景的3D目标检测方法。
这项工作的主要贡献可以总结如下:
- 我们从不同的角度全面回顾了3D目标检测方法,包括来自不同传感器输入的检测(基于LiDAR、基于摄像头和多模态)、时间序列检测、标签高效检测、以及3D目标检测在驾驶系统中的应用。
- 我们从结构和层次上总结了3D目标检测方法,对这些方法进行了系统分析,并为不同类别方法的潜力和挑战提供了有价值的见解。
- 对3D目标检测方法的综合性能和速度进行分析,确定多年来的研究趋势,并为3D目标检测的未来方向提供深刻的见解。
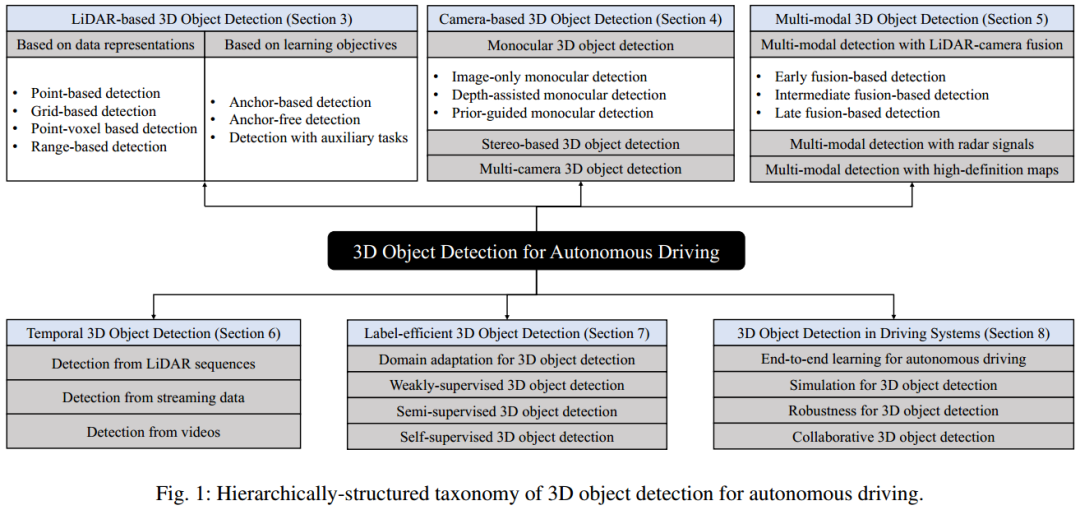
本文的结构安排如下:首先,第2节中介绍了3D目标检测问题的定义、数据集和评价指标。然后,我们回顾和分析了基于LiDAR传感器(第3节)、相机(第4节)和多模态数据输入(第5节)。接下来,我们在第6节中介绍利用时空数据的检测方法,并在第7节中使用较少有标签数据的方法。我们随后在第8节中讨论3D目标检测在驾驶系统中的应用。最后,我们进行速度和性能分析,对研究趋势进行了探讨,并在第9节中展望3D目标检测的未来方向。分层结构的分类如下图所示。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢