
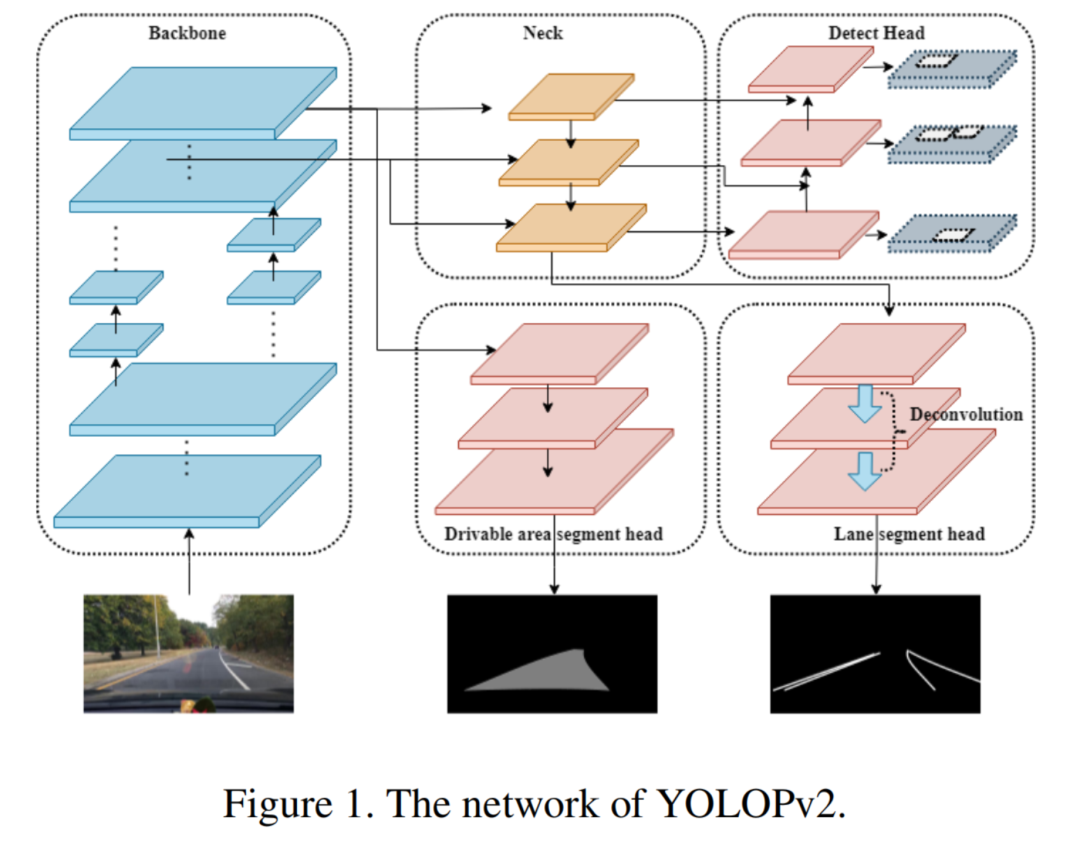
在过去的十年中,多任务学习方法在解决全景驾驶感知问题方面取得了不错的成果,同时提供了高精度和高效率的性能。在为计算资源有限的实时实际自动驾驶系统设计网络时,它已成为一种流行的范例。本文提出了一种有效且高效的多任务学习网络,可同时执行交通目标检测、可行驶道路区域分割和车道检测任务。
YOLOP-v2模型在具有挑战性的 BDD100K 数据集上的准确性和速度方面实现了新的最先进 (SOTA) 性能。特别是与之前的 SOTA 模型相比,推理时间减少了一半。
论文链接:
这项工作的主要贡献总结如下:
-
更好:我们提出了一种更有效的模型结构,并开发了更复杂的免费袋,例如,在对数据预处理执行 Mosaic 和 Mixup 以及应用了一种新的混合损失时。
-
更快:我们为模型实施了更高效的网络结构和内存分配策略。
-
更强:我们的模型是在强大的网络架构下训练的,因此它具有很好的通用性,可以适应各种场景并同时保证速度。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢