
论文地址:https://arxiv.org/pdf/2204.00944.pdf
摘要
我们提出了Path-CNN,这是一种通过将卷积神经网络(CNN)嵌入到渐进的最小路径方法中的方法来分割管状结构中心线的方法。最小路径方法被广泛用于拓扑意识到的中心线分割,但通常这些方法依赖于弱的手动图像特征。相比之下,CNN使用强大的图像特征,这些特征是从图像中自动学习的。但是CNN通常不会考虑结果的拓扑,并且通常需要大量的注释进行训练。我们将CNN集成到最小路径方法中,以便两种技术彼此受益:CNNS采用已学习的图像特征来改善最小路径的确定,而最小路径方法可确保分段中心线的正确拓扑,提供强大的几何先验以提高CNN的性能,并大大减少CNN训练的注释量。我们的方法比最近的许多方法具有较低的硬件要求。与其他方法的定性和定量比较表明,Path-CNN的性能更好,尤其是在处理具有挑战性的环境中具有复杂形状的管状结构时。
主要贡献
在这项工作中,我们提出了一种新颖的方法Path-CNN,将CNN嵌入到渐进的最小路径方法中[15],以便这两种技术交替运行并彼此受益:一方面,我们使用CNN来自动学习图像特征,以便可以检测到更广泛的捷径,因此可以更好地确定最小的路径。我们的CNN并没有像以前的大多数方法那样学习孤立像素的功能,而是学习沿路径的整流贴片的功能。另一方面,渐进式最小路径方法不仅确保了结果的线路,还提供了强大的几何先验,这些方法又用于减少CNN的训练样本数量。尽管我们仅将中心线用作训练数据,但我们的方法不仅决定了中心线,而且还会生成用于管状结构的二进制分割掩模。据我们所知,这是使用此类几何先验的CNN来分段管状结构中心线的第一种方法。与基于深度学习的大多数其他方法相比,我们的方法不仅对注释数量,而且对硬件的需求较低。
方法
在本节中,我们提出了Path-CNN,这是一种解决最小路径方法的常见问题的新方法:捷径问题。为此,我们将CNN嵌入了渐进的最小路径方法[15]中,以使这两种技术自然相互补充以实现更好的性能。
捷径的分类学
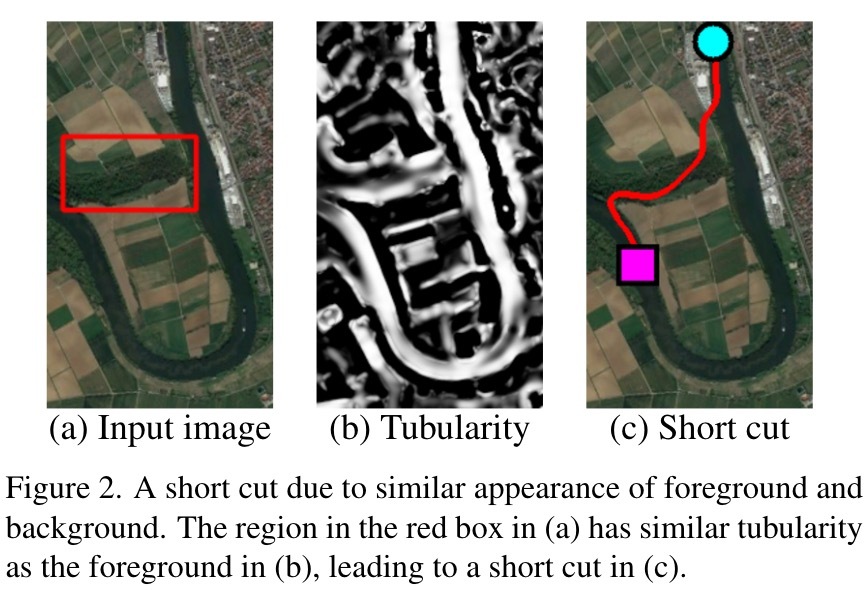
捷径是通过最小路径方法发现的错误中心线。捷径分别有两个原因,我们分别称为1型和类型2。在类型1的情况下,正确的路径可能非常长且弯曲,因此,尽管在背景中运行,但还是较短的连接,但仍达到较低的成本(1),例如图1B中的示例。在2型的情况下,背景可能与前景非常相似。例如,在图2a中,红色框表示与附近河流相似的背景区域。该区域还具有高管状性(图2B),导致捷径(图2C)。大多数以前的方法仅尝试避免捷径1类,而某些方法在某些假设下处理了2型的几何形状或管状结构的外观(例如[4])。相反,我们的方法以一般和统一的方式考虑了两种类型。
路径分类
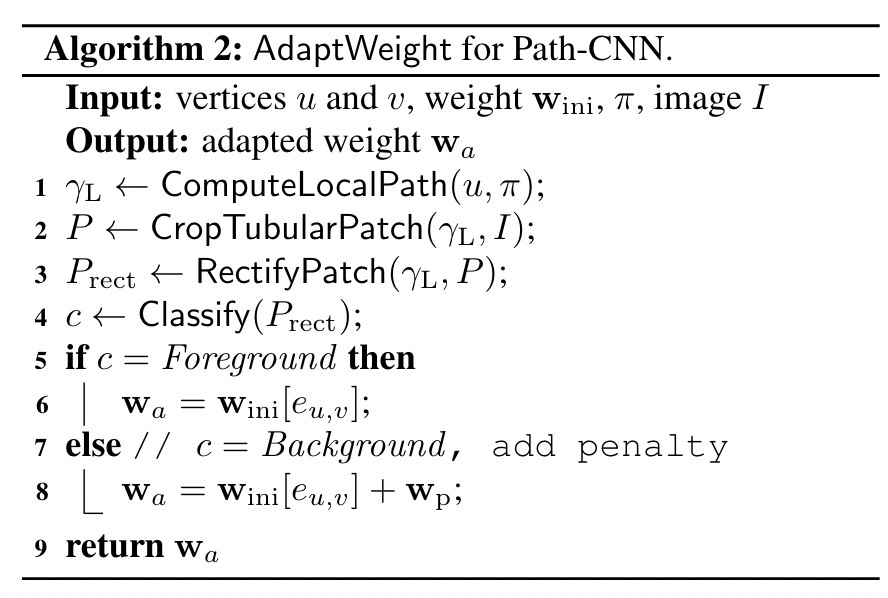
为了避免捷径,我们在Dijkstra的算法中添加了一个步骤:应用CNN用于使用本地路径提取的图像贴片进行分类,并使用分类结果来检测可能的短切割。
实验结果
我们将我们的方法与其他五种方法进行了比较,包括DIJK,DIJK-CNN,PROG,PROG-CNN和U-NET [21]。 DIJK和DIJK-CNN是使用不同管状措施的标准Dijkstra的算法[7]:DIJK使用该方法[8],而DIJK-CNN使用MobileNet特征。同样,使用方法 [8]和MobileNet特征,PROG和PROG-CNN是进行性最小路径法[15]。像DIJK和PROG一样,我们的方法还使用管状度量[8]来计算初始边缘重量\( w_{ini} \)。在DIJK和DIJK-CNN中,边缘的重量保持恒定,而PROG和PROG-CNN通过对局部路径进行分类来适应边缘重量。但是与我们的方法不同,PROG或PROG-CNN中没有种植或纠正。取而代之的是,仅使用管状度量的平均值[8]或本地路径上的MobileNet特征用于分类。与我们方法的F-map的定义类似,我们将PROG和PROG-CNN的F-map定义为被分类为前景的区域。 DIJK和DIJK-CNN没有分类步骤,因此,我们将DIJK和DIJK-CNN的F-map定义为终点为终点时的距离不再更改起点的区域到达。
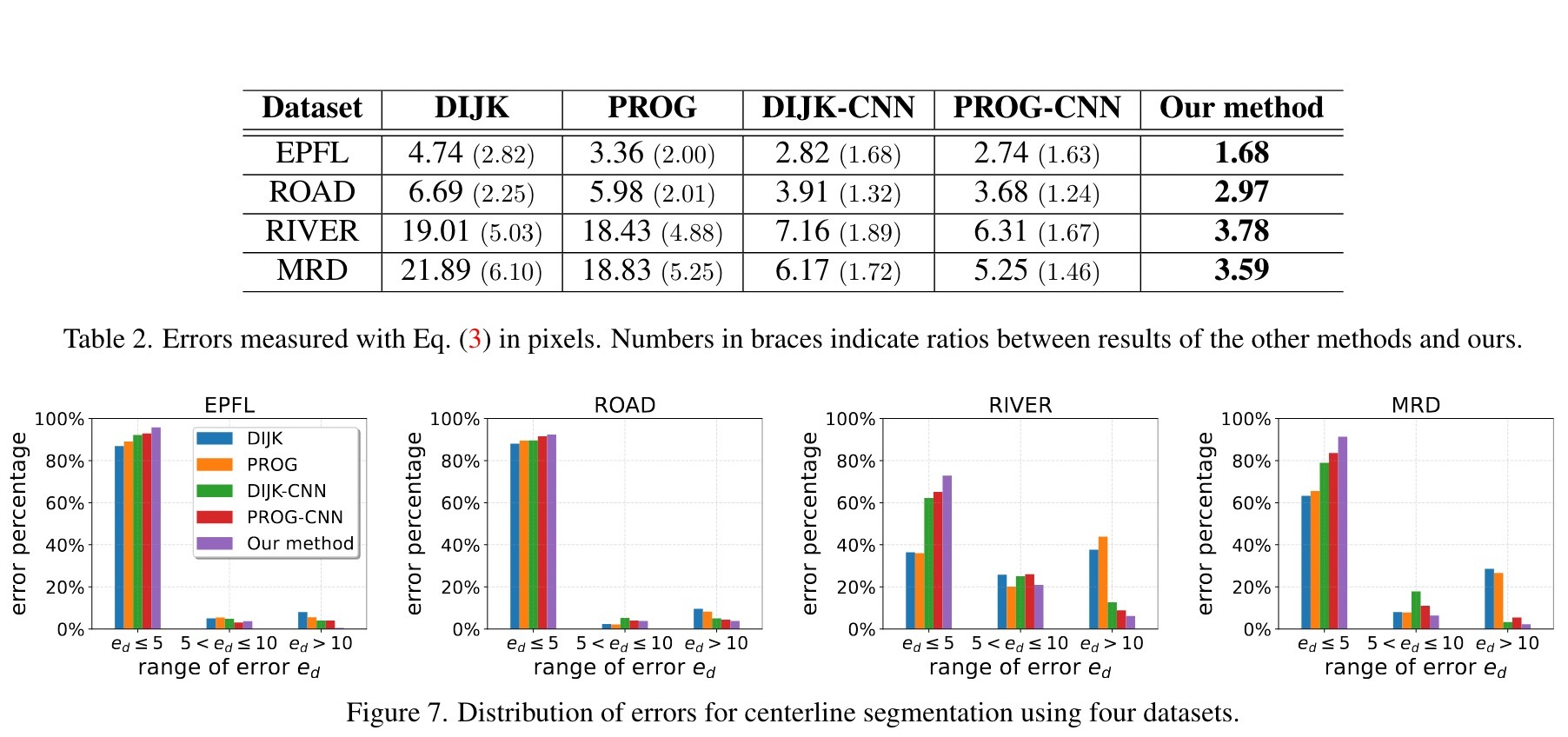
在图7中,分段中心线上的点的错误ED分为三个间隔,即,误差小于5像素,分别在5至10像素之间,大于10像素。界限的最低误差设置为5像素,因为这大约是管状宽度的一半。该范围内的中心线被认为足够接近地面真理,因为我们不使用管状结构的宽度信息来训练我们的算法。直觉上,较高的大错误比例表明更多的捷径。使用我们的方法,中心线上的大多数点在较小的误差范围内。例如,在EPFL中我们方法分割的中心线上的点中,有95.78%的误差在5像素以下,只有0.52%的误差大于10像素。相比之下,DIJK,PROG,DIJK-CNN和PROG-CNN的误差大于10像素的4%至8%。对于河流,我们方法的错误中有72.89%的错误低于5像素。对于我们的方法,10像素的错误百分比为6.20%,但DIJK,Prog,DIJK-CNN和PROG-CNN分别为37.71%,43.88%,12.71%和8.92%。同样对于MRD,我们的方法的误差小于5像素的91.38%。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢