
动态环境下的SLAM系统一直都是一项具有挑战的问题,基于学习的方法在动态物体出现大面积遮挡时容易出现漏检,而基于几何的方法对于动态物体的位姿估计不是那么准确。在2022 IEEE RA-L论文"DynaVINS: A Visual-Inertial SLAM for Dynamic Environments"中,作者提出了一种动态环境下的VINS系统,笔者认为最大的创新在于解决了临时静态对象引起的假阳性回环问题。
1. 论文信息
标题:DynaVINS: A Visual-Inertial SLAM for Dynamic Environments
作者:Seungwon Song, Hyungtae Lim, Alex Junho Lee, Hyun Myung
来源:2022 IEEE RA-L
原文链接:https://arxiv.org/abs/2208.11500
代码链接:https://github.com/url-kaist/dynavins
2. 摘要
视觉惯性里程计和SLAM算法广泛应用于各种领域,如服务机器人、无人机和自主车辆。大多数SLAM算法都是基于静态环境假设。然而,在现实世界中,存在各种动态对象,并且它们降低了姿态估计精度。此外,暂时静止的对象(在观察期间是静止的,但当它们离开视线时会移动)会触发错误的回环检测。为了克服这些问题,我们提出了一种新的视觉惯性SLAM框架,称为DynaVINS,它对动态对象和暂时静态对象都具有鲁棒性。
在我们的框架中,我们首先提出了一种鲁棒的BA,它可以通过利用IMU预积分估计的姿态先验来拒绝来自动态对象的特征。然后,提出了关键帧分组和基于多重假设的约束分组方法,以减少暂时静止物体对回环的影响。随后,我们在包含大量动态对象的公共数据集中评估了我们的方法。最后,实验结果证实了我们的DynaVINS通过成功地拒绝动态和暂时静态对象的影响,与其他最先进的方法相比具有良好的性能。
3. 算法分析
如图1所示是作者提出的Dyna-VINS的整体架构,算法的输入为单目/双目图像和IMU信息,并进行特征跟踪和IMU预积分。然后,经过鲁棒BA来从动态对象中丢弃跟踪的特征,只有静态对象的特征被保留。之后使用被追踪特征的数量对关键帧进行分组,并且聚类在当前关键帧组中检测到的回环假设。最后在选择性优化中使用或拒绝具有权重的每个假设,最终获得面向动态和暂时静态对象鲁棒的轨迹。

图1 Dyna-VINS架构总览
综上所述,作者所做工作的主要贡献如下:
(1) 提出了鲁棒的VI-SLAM方法来处理主要的、未定义的动态对象,这些对象不能仅通过基于学习或仅视觉的方法来解决。
(2) 提出了一种新的BA算法,用于同时估计相机姿态和丢弃动态对象中明显偏离运动先验的特征。
(3) 提出了一种鲁棒的全局优化方法,将约束分组为多个假设,以拒绝来自暂时静态对象的回环。
3.1 应用场景
图2所示是Dyna-VINS应用的主要场景。图2(a)和图2(b)是城市环境中遇到大面积遮挡的情况,这种情况下深度学习方法可能会出现漏检。图2(c)是作者自建的临时静态物体场景,如果一个物体当前被观测的时刻是静止的,但后期发生移动的话,传统的基于几何的SLAM算法会发生假阳性回环。
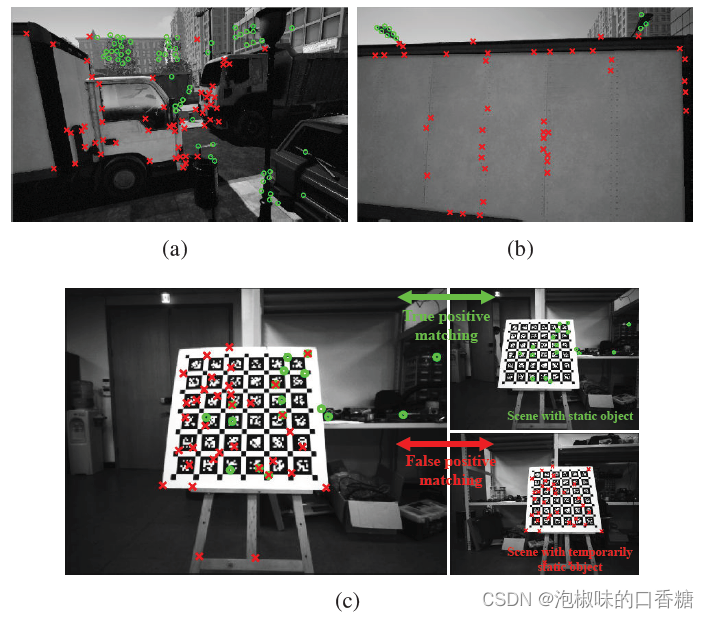
图2 主要测试的动态环境 (a)--(b) VIODE数据集的city_day序列,包含大量遮挡;(c) 自建数据集,包含暂时静态的对象
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢