
0. 引言
近年来,多传感器融合算法发展迅猛,不同传感器可以相互补充,通过融合提高系统的感知能力。但受限于标定成本和时间同步问题,多传感器数据集却不多。在2022 IROS论文"FusionPortable: A Multi-Sensor Campus-Scene Dataset for Evaluation of Localization and Mapping Accuracy on Diverse Platforms"中,作者提出了一个包含RGB相机、事件相机、IMU、激光雷达以及RTK-GPS的多传感器融合数据集。此外,文章中包含了大量的传感器标定方法和建立数据集所需要考虑的方方面面,进行传感器和数据集标定工作的小伙伴一定不要错过。
1. 论文信息
标题:FusionPortable: A Multi-Sensor Campus-Scene Dataset for Evaluation of Localization and Mapping Accuracy on Diverse Platforms
作者:Jianhao Jiao, Hexiang Wei, Tianshuai Hu, Xiangcheng Hu, Yilong Zhu, Zhijian He, Jin Wu, Jingwen Yu, Xupeng Xie, Huaiyang Huang, Ruoyu Geng, Lujia Wang, Ming Liu
来源:2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
原文链接:https://arxiv.org/abs/2208.11865
数据集链接:https://ram-lab.com/file/site/multi-sensor-dataset/
2. 摘要
结合多个传感器使机器人能够最大限度地感知环境,并增强其对外部干扰的鲁棒性,对机器人导航至关重要。本文提出了FusionPortable基准,这是一个完整的多传感器数据集,具有一组不同的移动机器人序列。本文有三个贡献。我们首先推出一款便携式多功能多传感器套件,提供丰富的传感器测量:10Hz激光雷达点云、20Hz RGB帧图像、来自事件相机的高速率和异步事件、来自IMU的200Hz惯性读数和10Hz GPS信号。传感器在硬件中已经暂时同步。这个设备是轻量级的、独立的,并且支持移动机器人的即插即用。其次,我们通过利用多个机器人平台进行数据收集,通过收集覆盖校园内各种环境的17个序列来构建数据集。一些序列对现有的SLAM算法提出了挑战。第三,我们为解耦定位和建图性能评估提供了基础事实。我们还评估了最先进的SLAM方法,并确定了它们的局限性。由原始传感器测量值、地面实况、校准数据和评估算法组成的数据集将被发布。
3. 算法分析
如图1所示是作者使用的多传感器设备,包括带有万向节稳定器的手持手柄,四足机器人,以及阿波罗自主车辆,可以发现所应用的平台包含了各个场景和应用。表1所示是该数据集与其他数据集在采集平台、室内外环境、传感器设备以及轨迹/地图采集方式的对比。可以看出,该多传感器数据集有三个明显优点:(1) 大量高精传感器的融合;(2) 包括腿式机器人在内的三个不同平台上的数据收集;(3) 用于算法评估的地面实况轨迹和3D地图。
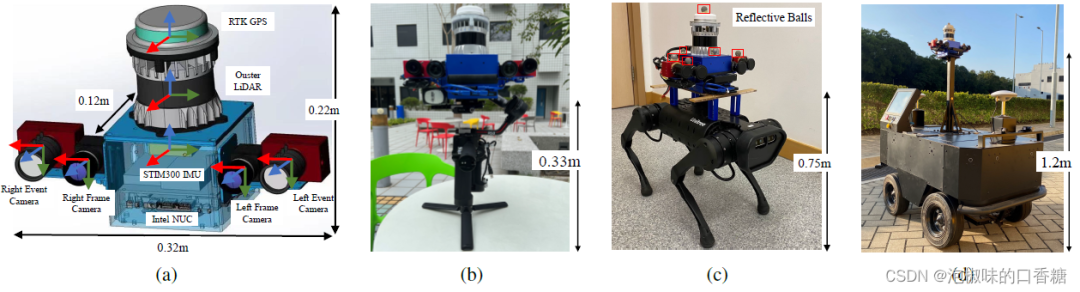
(a) 传感器装备的CAD模型 (b) 万向稳定器 (c) 四足机器人 (d) 阿波罗自动小车
图1 多传感器设备和数据收集平台
作者将其称为FusionPortable基准,他们工作的主要贡献如下:
(1) 制造了便携式和多功能的多传感器设备:左右两侧安装两个RGB相机,内部安装一个高频高精度IMU,顶部位置安装一个RTK-GPS,并将新型事件相机和高分辨率3D激光雷达集成。为减小动态偏差,所有传感器都安装在相同的刚性铝合金部件上。完整的设备有自己的时钟同步单元、处理器和电池,并且尺寸、重量和可扩展性较好。
(2) 作者将传感器安装在各种平台上,并在HKUST科技大学校园内的各种结构化或半结构化环境进行测试,包括实验室、花园、食堂、走廊、自动扶梯和室外道路。此外,收集的序列呈现了由外部光线、移动物体和场景纹理引起的几种环境变化。这些问题对SLAM算法都是挑战。
(3) 作者还提供了大多数室内场景的真实地图,并对几个最先进的SOTA SLAM系统进行基准测试,包括两个基于视觉的方法和四个基于激光雷达的方法。
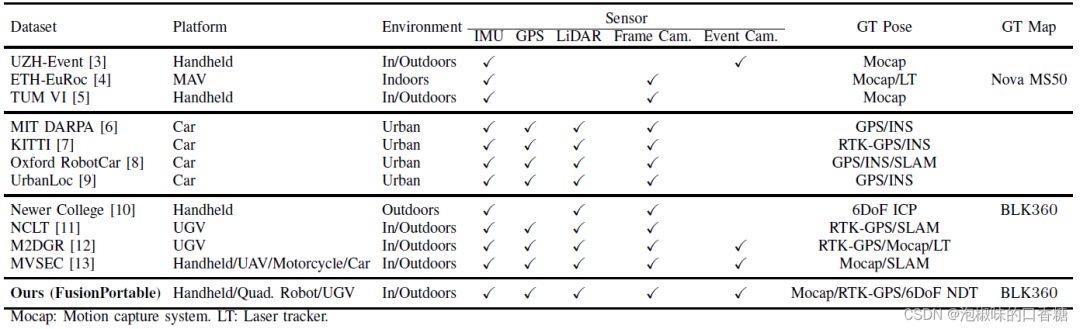
表1 FusionPortable与之前数据集在数据采集平台、环境、传感器类型和地面实况方法方面的比较
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢