
交通流预测作为时间序列分析中的一个典型问题,是机器学习最重要的应用领域之一。然而,由于道路网络中存在复杂的动态时空相关性,实现高度准确的交通流预测是一项具有挑战性的任务。本文提出了一种新的动态时空感知图神经网络(DSTAGNN)来建模路网中复杂的时空相互作用。首先,考虑到历史数据中蕴含着路网空间结构的内在动态信息,作者提出了一种基于数据驱动策略的动态时空感知图来代替传统图卷积中通常使用的预定义静态图。其次,本文设计了一种新的图神经网络结构,它不仅可以用改进的多头注意机制来表示节点间的动态空间相关性,而且可以通过多尺度门控卷积从多感受野特征中获取大范围的动态时间相关性。在真实数据集上的大量实验表明,本文提出的方法明显优于现有的方法。
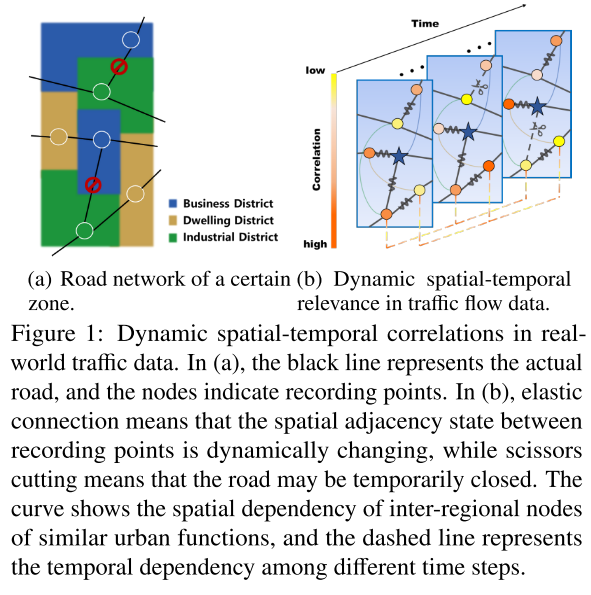
随着道路网中车辆数量的不断增加,交通管理系统面临的压力也越来越大。智能交通系统的发展是实现高效交通管理的迫切需要。交通流量预测是智能交通管理系统实现的必要前提,在智能交通系统中起着至关重要的作用。每个记录点(也称为路网中的节点)的交通呈现出高度动态和复杂的时空依赖性。一方面,道路网络中的智能体受到各种随机因素(如潜在的随机交通事故、临时封路维修等)的影响,从而影响相邻节点之间的到达时间间隔。另一方面,相似的城市功能区可能导致道路网络中节点之间的交通数据存在相关性,而无论节点之间的距离如何。例如,在日常高峰时段,办公集群区域往往同时出现拥堵。无花果。下图说明了交通流内部的动态时空相关性。此外,道路交通网络中复杂的时空交互作用会显著降低交通预测算法的性能。
论文链接:https://proceedings.mlr.press/v162/lan22a.html
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢