
【标题】Multi-Robot Active Mapping via Neural Bipartite Graph Matching
【作者团队】Kai Ye, Siyan Dong, Qingnan Fan, He Wang, Li Yi, Fei Xia, Jue Wang, Baoquan Chen
【发表日期】2022.3.30
【论文链接】https://arxiv.org/pdf/2203.16319.pdf
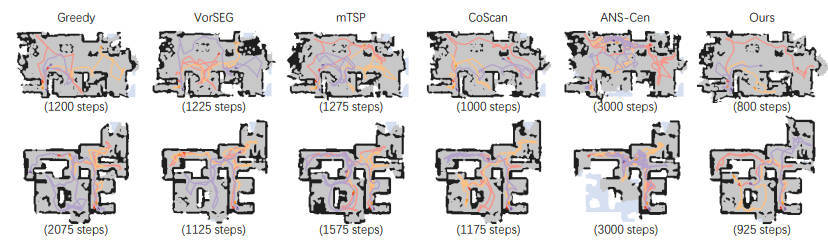
【推荐理由】本文研究了多机器人主动映射问题,其目标是在最短的时间内完成场景地图的构建。这个问题的关键在于目标位置估计,以实现更有效的机器人运动。以前的方法要么通过阻碍时间效率的短视解决方案选择边界作为目标位置,要么通过强化学习直接回归目标位置来最大化长期价值,但不能保证完整的地图构建。本文提出了一种新的算法,即NeuralCoMapping, 它利用了这两种方法。
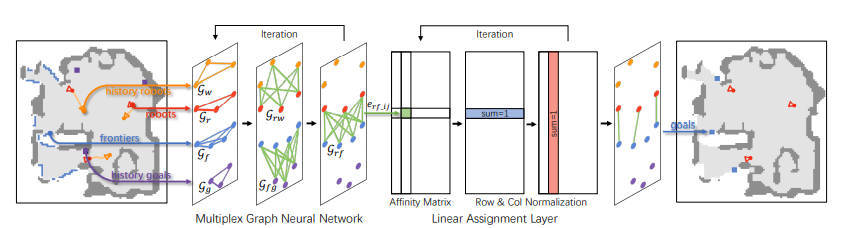
本文将问题简化为二分图匹配,它建立了两个图之间的节点对应关系,表示机器人和边界。文中引入了一个多路图神经网络 (mGNN),它学习神经距离以填充亲和矩阵,从而实现更有效的图匹配。并且通过强化学习最大化有利于时间效率和地图完整性的长期值,使用可微分线性分配层优化 mGNN。实验结果表明此算法在各种室内场景和未知数量的机器人上具有卓越的性能和出色的泛化能力。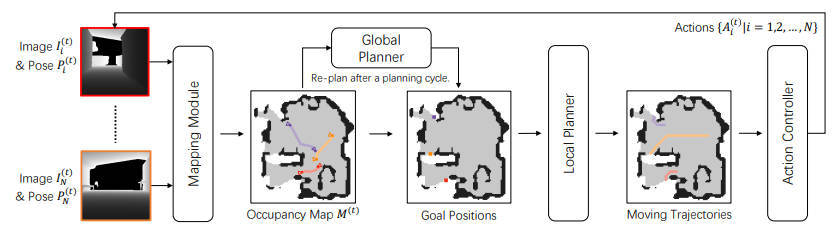
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢