
来自今天的爱可可AI前沿推介
[RO] Learning Robotic Navigation from Experience: Principles, Methods, and Recent Results
S Levine, D Shah
[UC Berkeley]
从经验学习机器人导航: 原理、方法与最新结果
要点:
-
机器学习提供了一种有前途的方法,可以超越传统的几何和规划,可根据历史经验探索机器人导航; -
本文为导航技能的实践学习提供了一个工具包,统一了近来的方法; -
算法可以组合起来解决暂时性的扩展导航问题。
摘要:
导航是机器人学中研究最多的问题之一,传统上是作为一个几何映射和规划问题来处理。然而,现实世界中的导航提出了一系列复杂的物理挑战,无法用简单的几何学抽象来解释。机器学习提供了一种超越几何学和传统规划的有希望的方法,允许导航系统根据实际的先前经验做出决定。这样的系统能够以超越几何学的方式推理可穿越性,考虑其行动的物理结果并利用现实世界环境中的模式。它们还可以随着更多数据的收集而改进,有可能提供一个强大的网络效应。本文提出一个用于机器人导航技能体验式学习的通用工具包,它统一了最近的几种方法,描述了基本的设计原则。
Navigation is one of the most heavily studied problems in robotics, and is conventionally approached as a geometric mapping and planning problem. However, real-world navigation presents a complex set of physical challenges that defies simple geometric abstractions. Machine learning offers a promising way to go beyond geometry and conventional planning, allowing for navigational systems that make decisions based on actual prior experience. Such systems can reason about traversability in ways that go beyond geometry, accounting for the physical outcomes of their actions and exploiting patterns in real-world environments. They can also improve as more data is collected, potentially providing a powerful network effect. In this article, we present a general toolkit for experiential learning of robotic navigation skills that unifies several recent approaches, describe the underlying design principles, summarize experimental results from several of our recent papers, and discuss open problems and directions for future work.
论文链接:https://arxiv.org/abs/2212.06759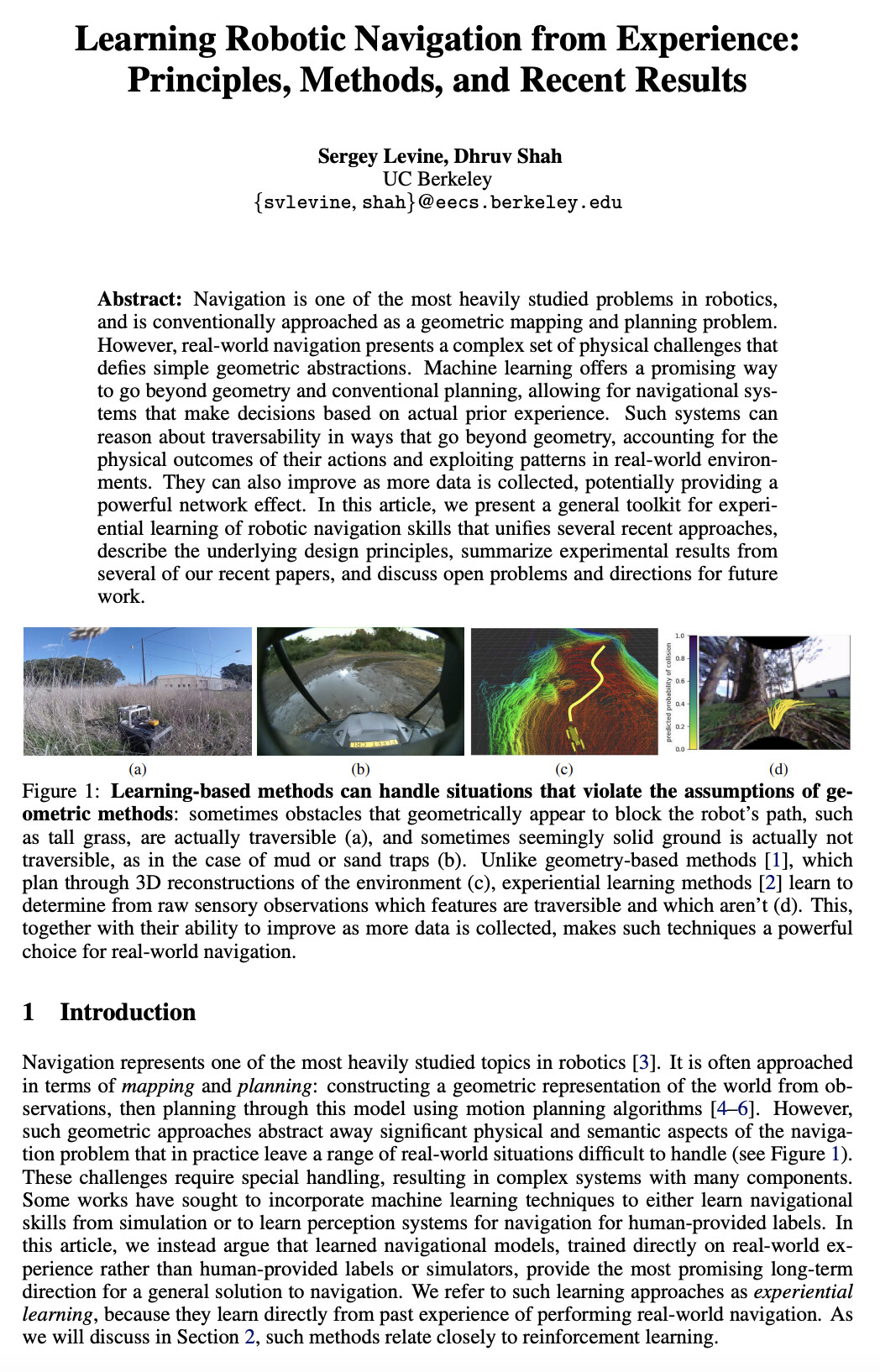
内容中包含的图片若涉及版权问题,请及时与我们联系删除


评论
沙发等你来抢