
器学习 (ML) 研究的多个子领域(如计算机视觉和自然语言处理)的许多最新进展,都是建立在利用大型、多样化的数据集和能够有效吸收所有数据的表达模型。
但这种高性能模型方法在机器人技术领域的应用却相对较少。
原因很简单,首先缺乏大规模和多样化的机器人数据,限制了模型吸收广泛机器人经验的能力。
其次,缺乏可从此类数据集中学习并有效泛化的表达力强、可扩展且速度足够快的实时推理模型。
而这次,谷歌推出的Robotics Transformer 1 (简称RT-1)是一种多任务模型,它可以标记机器人输入和输出动作(例如,相机图像、任务指令和电机命令)以在运行时实现高效推理,并使实时控制成为可能。
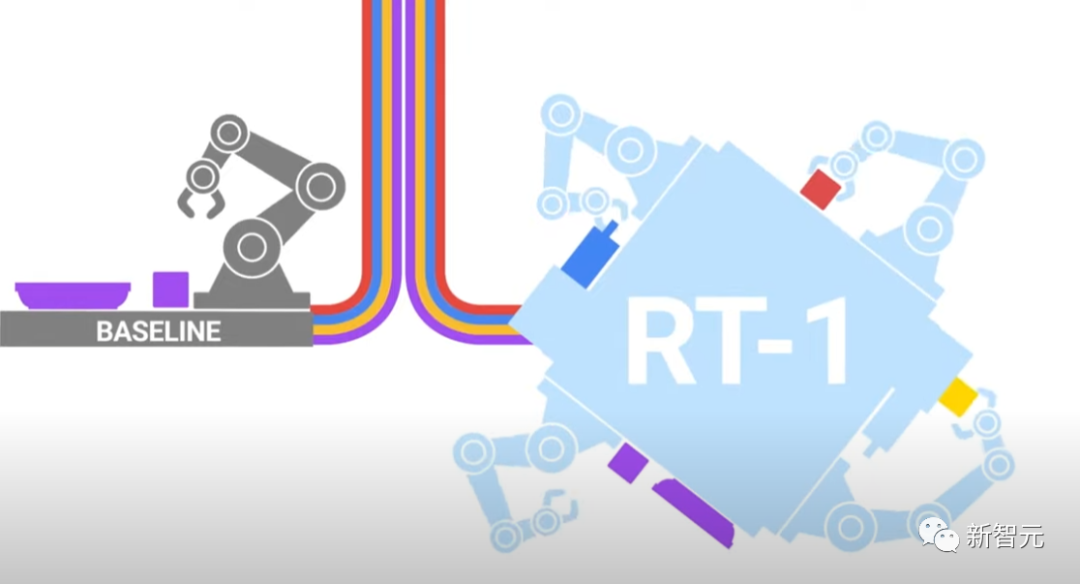
RT-1吸收了大量数据,让机器人胜任不同环境下的多种任务,从而提升机器性能和泛化能力
简单来说,就是让一个机器人同时干几份活。
该模型是在一个包含130k个episode的大型真实世界机器人数据集上训练的,该数据集涵盖700多项任务,使用Everyday Robots (EDR) 的13台机器人在17个月内收集而成。
结果表明,与现有技术相比,RT-1可以显著改进对新任务、环境和对象的零样本泛化。
Github链接小编也贴心地放在下面啦,有兴趣的小伙伴赶紧去看看。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢