
Attention-SLAM: A Visual Monocular SLAM Learning from Human Gaze
论文链接:https://arxiv.org/abs/2009.06886 代码链接:https://github.com/Li-Jinquan/Salient-Euroc
本文将视觉显著性模型与单目SLAM相结合,在效率,准确性等方面均优于DSO,ORB-SLAM等基准。而且作者将语义显著性信息添加到Euroc数据集,以生成Salient-Euroc:显著性SLAM数据集。数据集即将开源!作者单位:上海交通大学
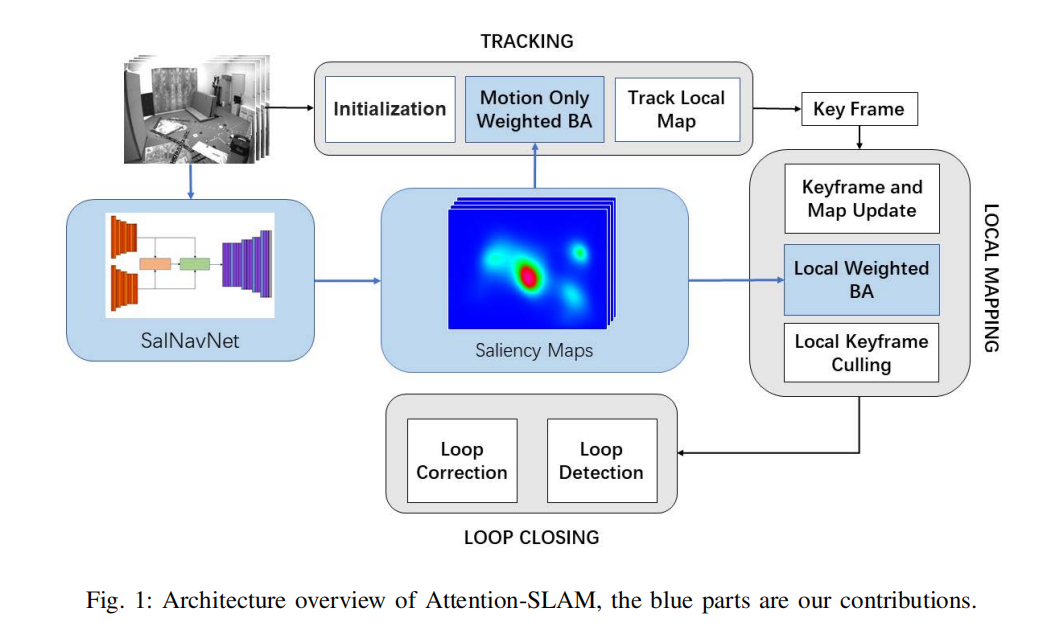
本文提出了一种新颖的SLAM方法,即Attention-SLAM,该方法通过将视觉显著性模型(SalNavNet)与传统的单目视觉SLAM相结合来模拟人类导航模式。大多数SLAM方法在优化过程中将从图像中提取的所有特征都视为同等重要。但是,场景中的显著特征点在人类导航过程中具有更大的影响力。因此,我们首先提出一个称为SalVavNet的视觉显著性模型,其中引入相关模块并提出自适应指数移动平均值(EMA)模块。这些模块减轻了中心偏差,从而使SalNavNet生成的显著图可以更加关注同一凸出对象。此外,显著性图可模拟人类行为以完善SLAM结果。从显著性区域提取的特征点在优化过程中具有更大的重要性。我们将语义显著性信息添加到Euroc数据集,以生成开源显着性SLAM数据集。全面的测试结果证明,在大多数测试用例中,Attention-SLAM在效率,准确性和鲁棒性方面均优于Direct Sparse Odometry(DSO),ORB-SLAM和Salient DSO等基准。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢