
来自爱可可的前沿推介
[LG] Unsupervised 3d object learning through neuron activity aware plasticity
基于神经元激活感知可塑性的无监督3D目标学习
要点:
-
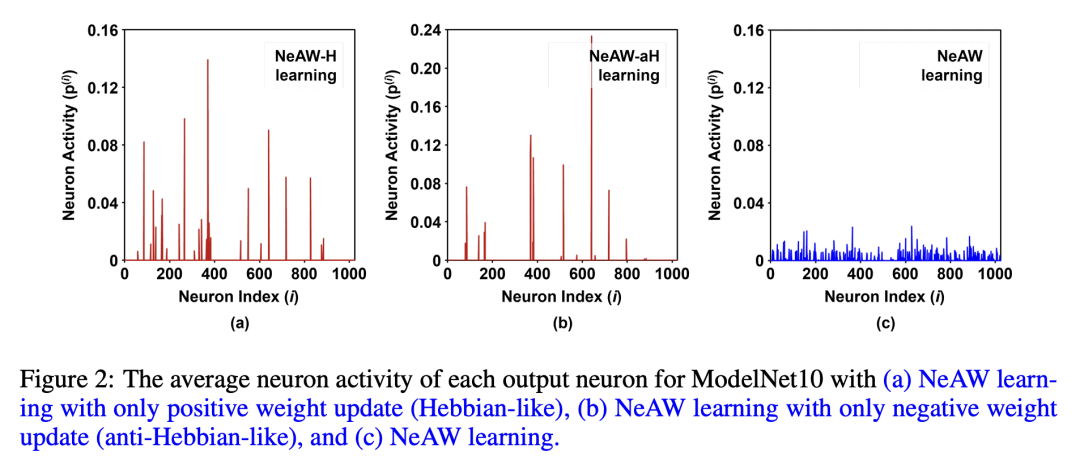
基于神经元激活感知(NeAW)Hebbian学习规则提出了3D目标识别的深度学习模型,该规则动态控制 Hebbian 和反 Hebbian 学习,以缓解神经元激活偏差; -
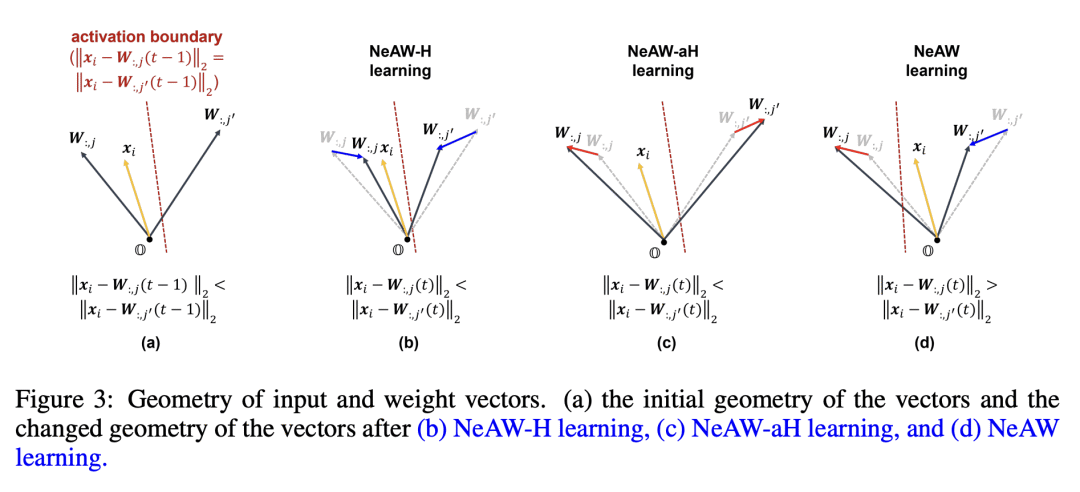
分析证明,如果输入在给定的几何条件下,NeAW Hebbian学习可以缓解输出神经元激活偏差; -
NeAW Hebbian学习规则在3D目标识别任务中的表现优于Hebbian学习规则的现有变体,并且当训练数据有限(数据高效学习)时,比端到端监督学习具有更高的准确性。
一句话总结:
提出一种深度学习模型,使用一种新的神经元激活感知(NeAW)Hebbian动态切换Hebbian学习和反Hebbian学习,与其他方法相比,即使训练数据有限,3D目标识别的准确性也更高。
论文地址:https://openreview.net/forum?id=mXPoBtnpMnuy
摘要:
提出一种用于3D目标分类的无监督深度学习模型。传统的Hebbian学习是一种众所周知的无监督模型,由于局部特征的损失,导致具有复杂几何对象的任务的性能下降。本文提出一种基于新的神经元激活感知(NeAW)Hebbian学习规则的深度网络,该规则根据神经元的激活动态切换由 Hebbian 控制的学习或反 Hebbian 学习。分析表明,NeAW Hebbian学习缓解了神经元激活的偏差,允许更多的神经元关注3D目标的表示。实证结果表明,当训练数据有限时,NeAW Hebbian学习的表现优于 Hebbian 学习的其他变体,并且比全监督的模型具有更高的准确性。
We present an unsupervised deep learning model for 3D object classification. Conventional Hebbian learning, a well-known unsupervised model, suffers from loss of local features leading to reduced performance for tasks with complex geometric objects. We present a deep network with a novel Neuron Activity Aware (NeAW) Hebbian learning rule that dynamically switches the neurons to be governed by Hebbian learning or anti-Hebbian learning, depending on its activity. We analytically show that NeAW Hebbian learning relieves the bias in neuron activity, allowing more neurons to attend to the representation of the 3D objects. Empirical results show that the NeAW Hebbian learning outperforms other variants of Hebbian learning and shows higher accuracy over fully supervised models when training data is limited.
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢