

【论文标题】PL-VINS: Real-Time Monocular Visual-Inertial SLAM with Point and
Line
【作者团队】Qiang Fu, Jialong Wang, Hongshan Yu, Islam Ali, Feng Guo, Hong Zhang
【发表时间】2020/09/16
【论文链接】https://arxiv.org/pdf/2009.07462.pdf
【代码链接】https://github.com/cnqiangfu/PL-VINS
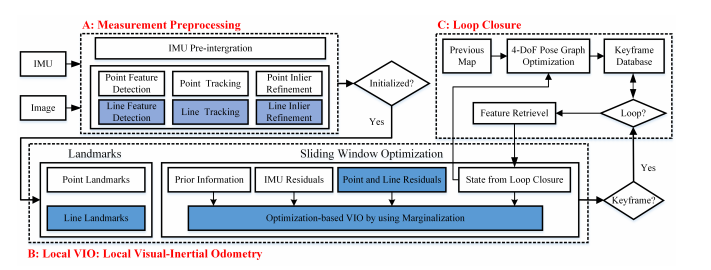
【推荐理由】本文针对单目视觉导航问题中,如何基于点、线特征提高导航定位精度进行了研究。利用线特征来提高基于点的视觉导航SLAM(VINS)的定位精度,正变得越来越重要。因为它们提供了场景结构规律性的附加约束,但是实时性能并未得到关注。
为了解决以上问题,作者介绍了一种叫做PL-VINS的方法,这是一种基于点和线的单目VINS方法。通过研究隐藏参数调整和长度拒绝策略来加快针对特定姿态估计问题的线检测过程。 修改后的LSD可以用于现有的根据线对应估计位姿的工作,运行速度至少是普通LSD的三倍。此外,通过用Plucker坐标表示线界标,将线重投影残差建模为中点到线的距离。然后通过迭代更新Plucker坐标的最小四参数正交法线表示将其最小化。通过使用四参数正交法线表示和中点到线的距离度量,有效地利用滑动优化窗口中的线约束进行高精度的姿态估计。在相同的运行速度下,PL-VINS可以比最新的VINSMono产生更高的定位精度。在未进行GPU并行化的低功耗CPU (1.1 GHz)上,以相同工作频率与EuSoc单声道和公共EuRoc基准数据集进行的实验表明。相比于VINS-Mono,本文方法的定位误差降低了12-16%。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢