
【国防科技大学&中山大学团队】椭圆坐标系下双目协调合作目标跟踪方法 【论文标题】:Collaborative Target Tracking in Elliptic Coordinates: a Binocular Coordination Approach 【论文作者】:Yuan Chang,Zhiyong Sun,Han Zhou,Xiangke Wang,Lincheng Shen,Tianjiang Hu 【发表时间】:2020/09/21 【论文链接】:https://arxiv.org/abs/2009.09915 【推荐原因】: 本文研究了基于双目椭圆坐标系的无奇点协作跟踪问题。
在搜素与救援、环境检测、灾害响应与体育报道中,相互协作的 MAS(多智能体系统)的成本收益最高。该文章研究编队约束下的一对跟踪智能体的协同目标跟踪控制问题,提出了一种使用一对跟踪智能体进行协作目标跟踪的新型控制方法。跟踪任务中的编队约束以椭圆坐标表示,其采用控制器只需要测量跟踪智能体和目标之间的距离即可,通过调节目标跟踪系统的旋转,平移和缩放来实现控制目标。该文章提供了详细的稳定性分析,模拟演示了静止或缓慢漂移目标的跟踪性能。此外,该协作目标跟踪控制方法或可以扩展到多机器人系统。
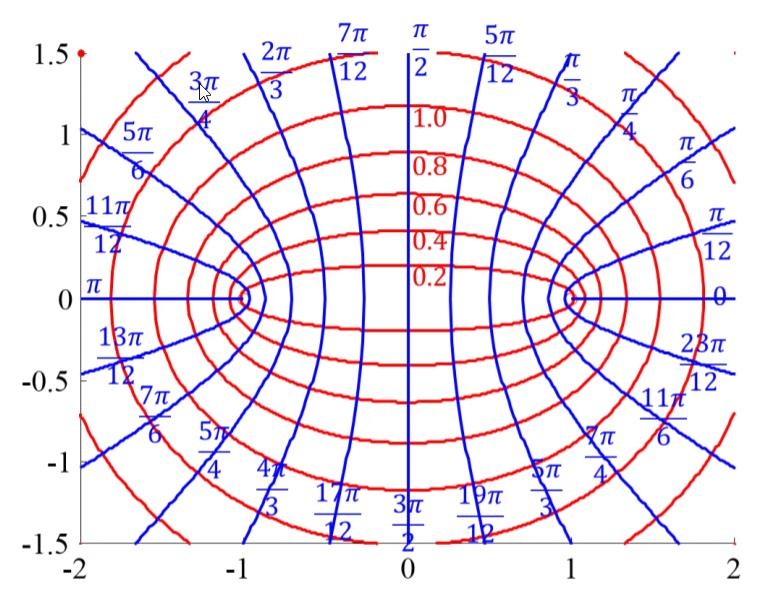 椭圆坐标系描绘示意图
椭圆坐标系描绘示意图
本文的主要贡献如下: (1)采用椭圆坐标描述任意跟踪形式,将其视为双目系统极坐标的自然扩展,可以从各个智能体之间的距离推到出来并且不存在奇点, (2)充分利用椭圆坐标的物理含义和几何形状,遵循双目协调院里以简洁的形式提出了一种跟踪控制律, (3)仿真结果表明,当跟踪目标静止时该跟踪系统是指数收敛的;跟踪慢速漂移的目标时该该跟踪系统可以鲁棒地调节跟踪误差收敛到与漂移速度成比例的小裕度。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢