


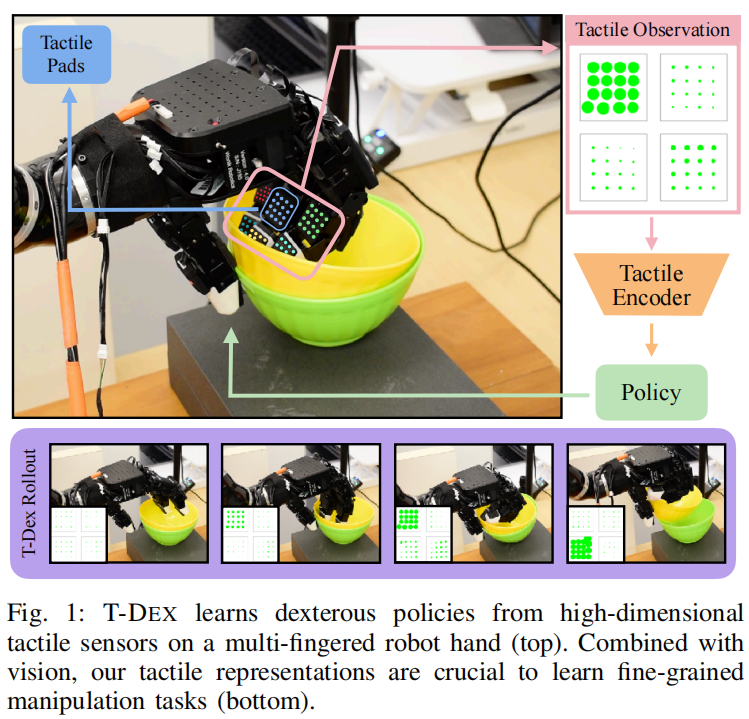
教导多手指机器人实现灵活操作在相关研究中一直是一个未解决的挑战问题。主流的方法一般关注于学习控制器或机器策略来进行基于视觉观察的反馈和操作。然而,这些方法在精细化的识别任务,例如需要根据接触面进行推理、根据手臂自身遮挡进行推理的任务时,往往性能有限。因此,文本提出T-DEX以实现触觉的灵巧性。作者首先收集了2.5小时的训练数据,并用其进行触觉信息编码器的自监督学习。接着,利用具体任务,作者将触觉信息与视觉信息进行表达,得到非参数化的反馈策略。在五分挑长相的触觉任务上,作者发现T-DEX超越了已有方法平均性能1.7倍。
标题:Dexterity from Touch: Self-Supervised Pre-Training of Tactile Representations with Robotic Play
论文:https://arxiv.org/pdf/2303.12076.pdf
作者:Irmak Guzey, Ben Evans, Soumith Chintala, Lerrel Pinto
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢