
作者:B Wen, J Tremblay, V Blukis, S Tyree, T Muller, A Evans, D Fox, J Kautz, S Birchfield
[NVIDIA]
推荐理由:
提出了近乎实时3D重建的新思路,将来可应用于3D激光雷达3D地图生成,在生活中可应用于自动驾驶和机器人领域。
总结:
提出了一种近乎实时的方法,可以从单目RGBD视频序列中追踪未知目标的6自由度,同时进行神经网络3D重建,该方法对任意刚性物体都适用,即使视觉纹理大部分都不存在。
要点:
-
提出一种近乎实时的方法,可从单目RGBD视频序列中追踪未知对象的6自由度,同时进行神经网络3D重建。 -
该方法对任意刚性物体都适用,即使视觉纹理大部分都不存在。 -
只需要在初始帧中分割出物体,不需要任何其他信息,也不做出任何关于交互代理的假设。 -
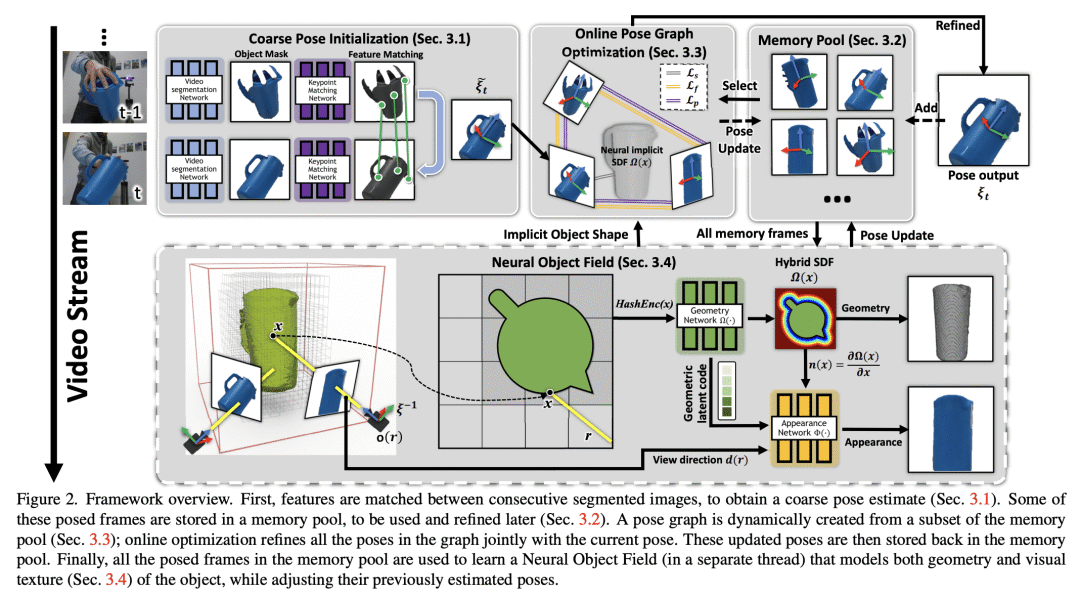
利用了两个并行线程,分别进行在线图姿态优化和神经对象场表示,能处理挑战性场景,如快速运动、部分或完全遮挡、缺乏纹理和镜面高光。
https://arxiv.org/abs/2303.14158
We present a near real-time (10Hz) method for 6-DoF tracking of an unknown object from a monocular RGBD video sequence, while simultaneously performing neural 3D reconstruction of the object. Our method works for arbitrary rigid objects, even when visual texture is largely absent. The object is assumed to be segmented in the first frame only. No additional information is required, and no assumption is made about the interaction agent. Key to our method is a Neural Object Field that is learned concurrently with a pose graph optimization process in order to robustly accumulate information into a consistent 3D representation capturing both geometry and appearance. A dynamic pool of posed memory frames is automatically maintained to facilitate communication between these threads. Our approach handles challenging sequences with large pose changes, partial and full occlusion, untextured surfaces, and specular highlights. We show results on HO3D, YCBInEOAT, and BEHAVE datasets, demonstrating that our method significantly outperforms existing approaches.
Project page:
https://bundlesdf.github.io/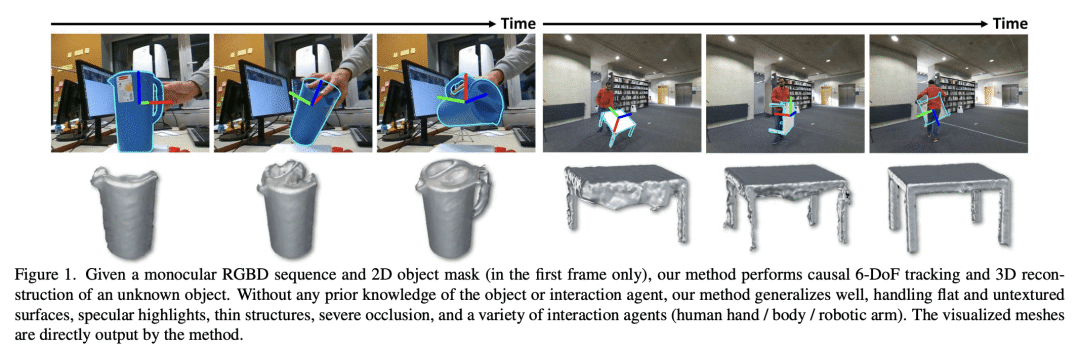
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢