
TidyBot: Personalized Robot Assistance with Large Language Models
解决问题:该论文旨在解决如何通过机器人进行个性化家庭清洁服务的问题。具体而言,通过学习用户的偏好,使机器人能够在未来的场景中普遍适用。
关键思路:该论文的关键思路是将基于语言的规划和感知与大型语言模型(LLMs)的少样本摘要能力相结合,推断出广泛适用于未来交互的用户偏好。相比当前领域的研究,该论文的思路在于将语言模型应用于机器人领域,以实现个性化服务。
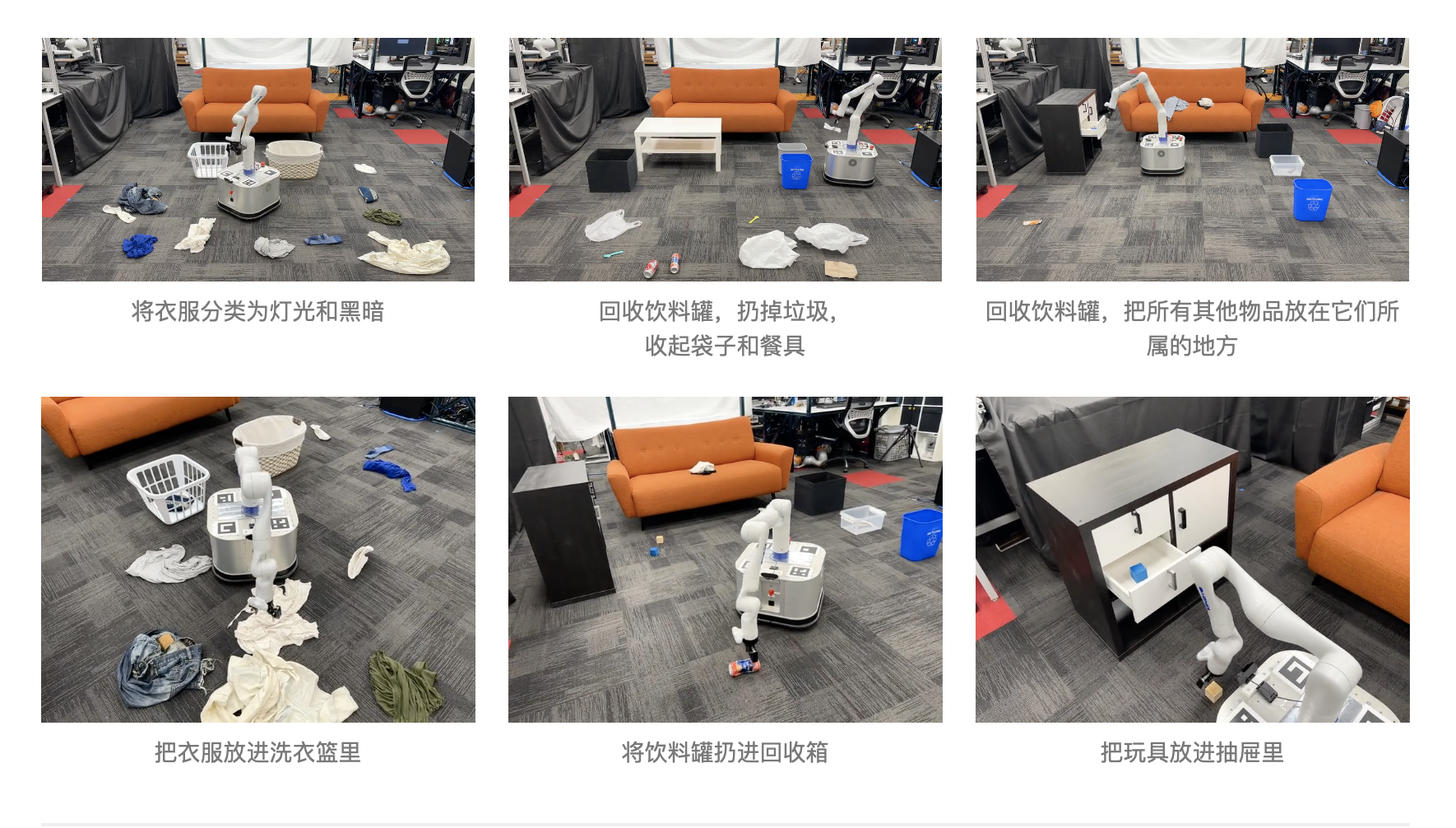
其他亮点:该论文使用了一个基准数据集,并在真实世界的移动机械臂TidyBot上进行了实验,成功将85.0%的物品放回其正确位置。值得注意的是,该方法在未见过的物品上实现了91.2%的准确性。此外,该论文还提出了一种新的思路,即将大型语言模型应用于机器人领域。
项目地址:https://tidybot.cs.princeton.edu
论文地址:https://arxiv.org/abs/2305.05658
关于作者:
该论文的主要作者包括Jimmy Wu, Rika Antonova, Adam Kan, Marion Lepert, Andy Zeng, Shuran Song, Jeannette Bohg, Szymon Rusinkiewicz, Thomas Funkhouser。
Princeton University、Stanford University、The Nueva School 、Google、Columbia University
论文摘要:
为了让机器人有效地个性化物理援助,它必须学习通常可以重新应用到未来场景的用户偏好。在这项工作中,我们调查了家庭清理的个性化,机器人可以通过捡起物品并把它们放好来整理房间。一个关键的挑战是确定放置每个物体的合适位置,因为人们的喜好可能因个人品味或文化背景而异。
例如,一个人可能更喜欢把衬衫放在抽屉里,而另一个人可能更喜欢把它们放在架子上。我们的目标是建立系统,通过事先与特定人的互动,从少数例子中学习这种偏好。我们表明,机器人可以将基于语言的规划和感知与大型语言模型(LLM)的少量总结能力相结合,以推断广泛适用于未来交互的广义用户偏好。这种方法可以实现快速适应,并在我们的基准数据集中对看不见的物体实现91.2%的准确性。我们还在名为TidyBot的现实世界移动机械手上演示了我们的方法,该机械手在现实世界测试场景中成功放置了85.0%的对象。
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢