
在机器人领域,特斯拉的人形机器人一直备受关注。
2021 年,在「特斯拉 AI 日」上,马斯克发布了特斯拉的通用机器人计划,并用图片展示了人形机器人 Tesla Bot 的大致形态。
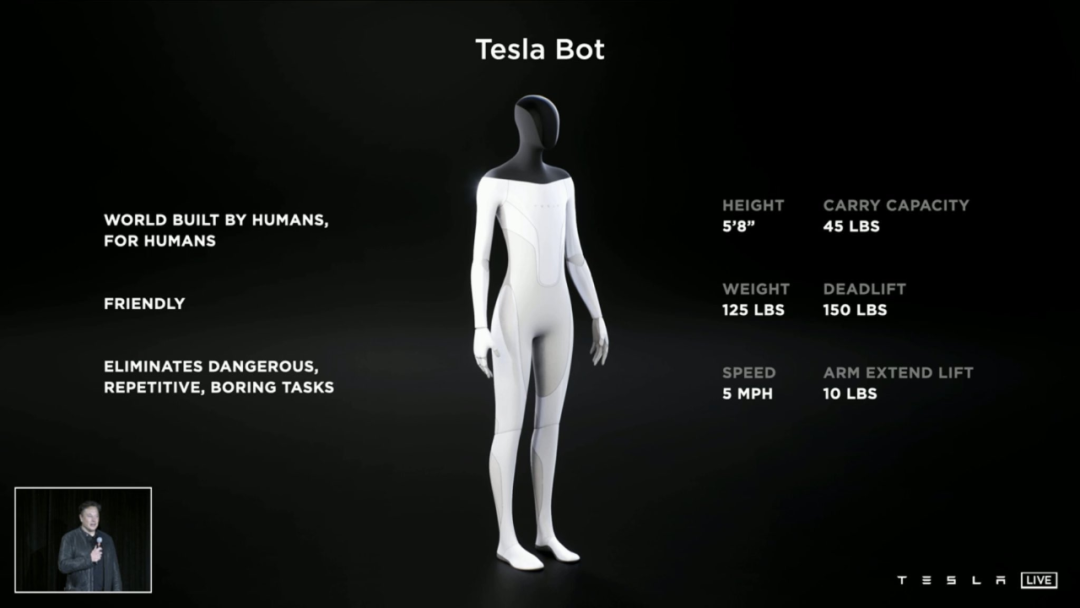
2021 年马斯克在「特斯拉 AI 日」上展示了 Tesla Bot 的大致形态。
但当时的 Tesla Bot 只是个概念,动作展示部分是由工作人员穿着特制的紧身服装,扮成机器人的模样表演了一段舞蹈。一年后在 2022「特斯拉 AI 日」上,人形机器人擎天柱(Optimus)实体亮相,缓缓走出并和观众打了个招呼。
2022 年 Optimus 在「特斯拉 AI 日」上亮相。初次亮相的 Optimus 在没有连线或者后援的情况下,只能简单走几步。最近,在特斯拉股东大会上,马斯克又展示了 Tesla Bot 的最新进展。现在 Tesla Bot 已经可以流畅行走了:
https://www.theverge.com/2023/5/16/23726139/tesla-robot-update-video-shareholder-meeting
几个机器人一起往前行走:
特斯拉的人形机器人灵活抓取放下物体:

从概念到基本具备行走和抓取物体的能力,我们来看一下特斯拉两年来做了哪些技术改进。
在感知层面,特斯拉的一个重要技术是Occupancy Network (占据网络),用于对3D空间中一些长尾障碍物的检测,来估测障碍物的位置大小,甚至可以估计物体的运动情况。
FSD算法利用传感器数据进行环境感知,这些传感器也可以帮助机器人感知周围环境,识别物体、人和障碍物等。
FSD算法在处理传感器数据时,具备对道路、车辆和行人等物体进行识别的能力,可以帮助机器人在执行任务时识别和定位物体。
在自动驾驶中,FSD算法可以根据感知到的环境信息进行路径规划和决策。
类似地,这种路径规划和决策的方法也可以应用于机器人,帮助机器人在复杂的环境中选择最佳路径和执行适当的决策。
在去年Tesla AI Day上,特斯拉就公布了一种在线矢量地图构建模型Lanes Network,可以得到车道线的拓扑结构,帮助自动驾驶汽车实现变道。
然而,由于机器人和自动驾驶领域的差异,可能需要对FSD算法进行适应和改进,以满足机器人特定的需求和任务。
这一切能够实现,都要基于特斯拉强大的技术软件基础(就是特斯拉超算中心里的东西)。
https://twitter.com/tesla_optimus/status/1658576897490530305
https://twitter.com/drjimfan/status/1658595224896311297
https://electrek.co/2023/05/16/tesla-bot-sideshow-new-footage-robots/
https://www.youtube.com/watch?v=N-_ZBfKXfr0
https://www.theverge.com/2023/5/16/23726139/tesla-robot-update-video-shareholder-meeting
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢