

Robot Learning with Sensorimotor Pre-training
Ilija Radosavovic, Baifeng Shi, Letian Fu, Ken Goldberg, Trevor Darrell, Jitendra Malik
[UC Berkeley]
Ken Goldberg,工业工程和运营研究教授,威廉·S小弗洛伊德加州大学伯克利分校工程杰出主席,Ambi机器人首席科学家
Jitendra Malik,加州大学伯克利分校电气工程和计算机科学系的Chick教授,Jitendra Malik是IEEE、ACM和美国艺术与科学院的会员,也是美国国家科学院和美国国家工程院的成员。
基于感知运动预训练的机器人学习
-
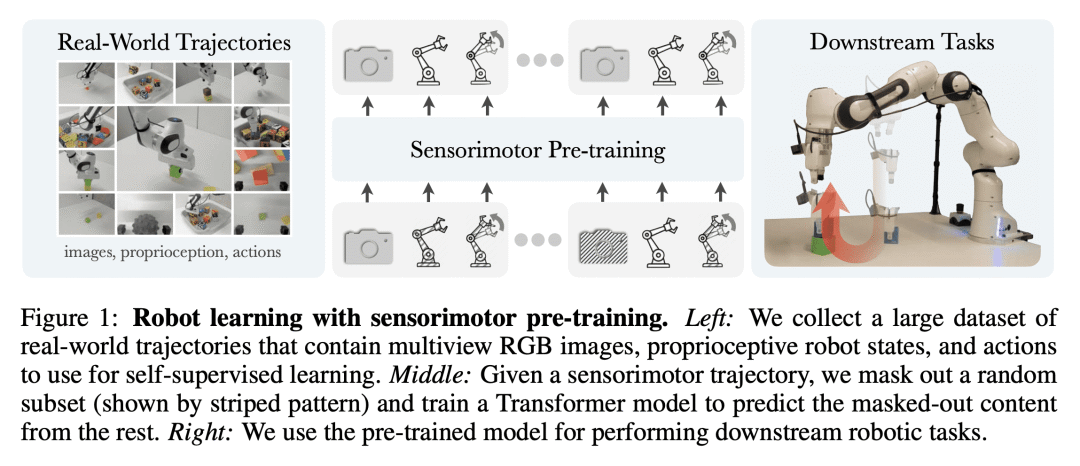
动机:提出一种自监督的感知运动预训练方法,用于机器人学习。如果机器人能预测缺失的感知运动内容,那么它就获得了一个关于物理世界的良好模型,可以使其行动起来。这种预训练方法是通过一种掩码重建任务来实现的,类似于语言和计算机视觉中的BERT和MAE。 -
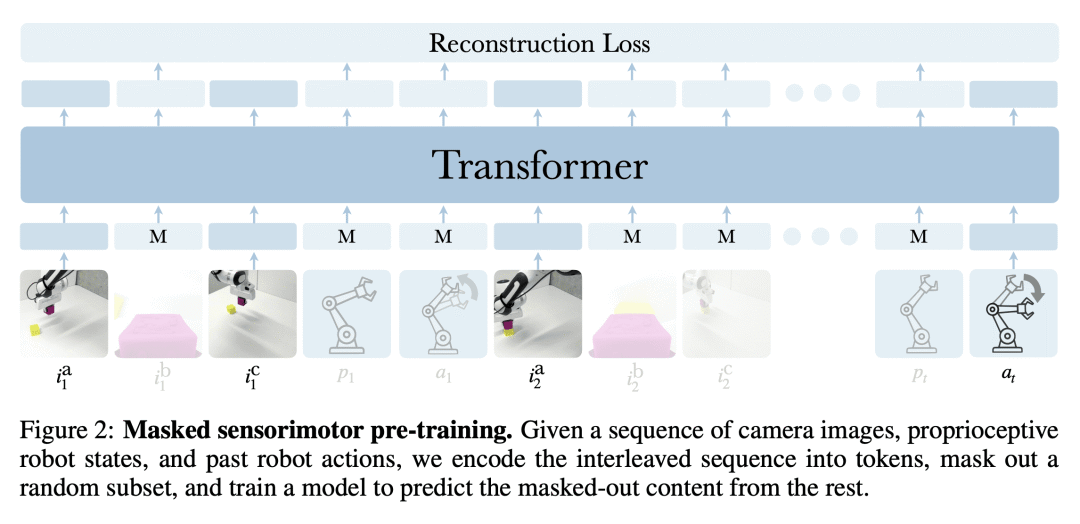
方法:所提出的模型RPT,是一个操作感知运动Token序列的Transformer。给定一系列相机图像、本体感知的机器人状态和过去的动作,将交错的序列编码成Token,随机掩码一部分,然后训练模型预测被掩码的内容。 -
优势:RPT设计用于在潜在的视觉表示上进行操作,这使得预测变得可行,能够扩展到更大的模型,并在真实的机器人上进行10 Hz的推理。通过在使用运动规划和基于模型的抓取算法收集的20000个真实世界轨迹的数据集上进行评估,我们发现预训练在这些数据上始终优于从头开始训练,可以在块堆叠任务中提高2倍的改进,并具有良好的扩展性。
提出一种自我监督的感知运动预训练方法,通过预测缺失的感知运动内容,使机器人获得了一个关于物理世界的良好模型,从而提高了机器人的学习和操作能力。
https://arxiv.org/abs/2306.10007
内容中包含的图片若涉及版权问题,请及时与我们联系删除

评论
沙发等你来抢